Формат файлов: AutoCAD, dwg, word, doc, pdf
Кол-во чертежей: 2
Категории: Чертежи проекты / ТММ
| Тип проекта |
Курсовой проект |
Кол-во листов (чертежей) |
| Формат |
AutoCAD, dwg, word, doc, pdf |
2(60) |
Кривошипно-ползуновый механизм
Курсовой проект
Вариант 1
Описание работы машины
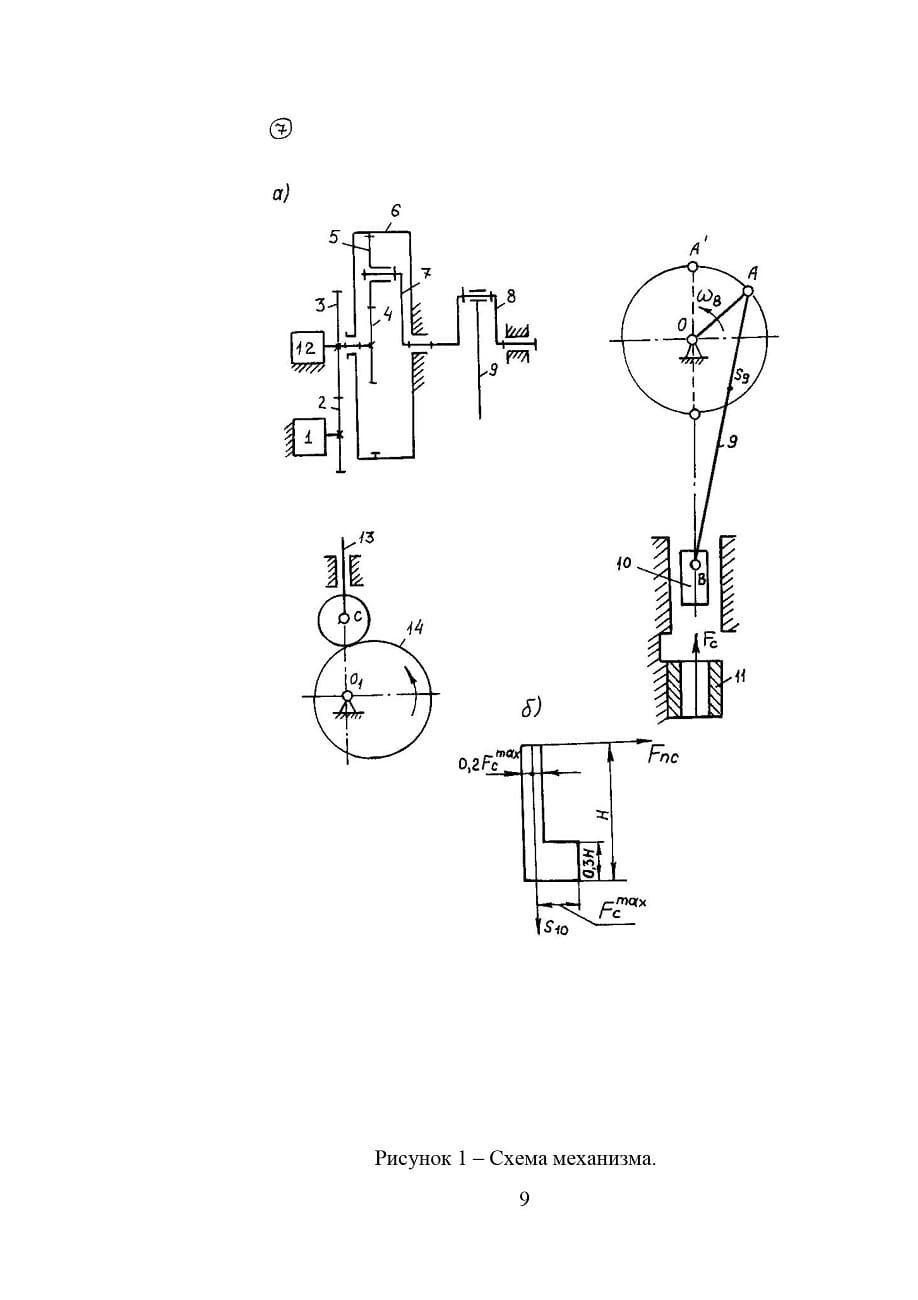
Вертикальный кривошипно-ползунный пресс предназначен для холодной штамповки (вырубки, гибки, вытяжки и др.). Движение от электродвигателя через зубчатую пару колес и планетарный редуктор передается входному звену (криво-шипу) исполнительного механизма и далее через шатун – ползуну (выходному звену), на котором установлен рабочий орган, обеспечивающий формирование детали, установленной в матрице.
На валу шестерни установлен масляный насос кулачкового типа. Закон изменения ускорения толкателя в пределах угла рабочего хода кулачка имеет вид косинусоиды
Параметры
Средняя скорость ползуна - 0,5 м/c
Отношение длины шатуна к длине кривошипа - 4
Отношение расстояния от центра тяжести шатуна до точки А к длине шатуна - 0.35
Частота вращения электродвигателя - 1420 об/мин
Вес шатуна - 400 Н
Вес ползуна - 600 Н
Усилие вытяжки (сила технологического сопротивления) - 300 кH
Коэффициент неравномерности вращения кривошипа - 1/20
Приведенные к валу кривошипа моменты инерции ротора, электродвигателя и всех зубчатых колес - 1.5 кг м2
Числа зубьев колес 2 и 3 - 10;16
Угол рабочего профиля кулачка - 170 град
Ход толкателя кулачка - 0,07 м
Допустимый угол давления кулачка на толкатель - 35 град
Частота вращения кривошипа - 48 об/мин
Список чертежей курсового проекта
Динамика машинного агрегата
Динамический анализ рычажного механизма
Из анализа выполненного исследования следует:
Спроектирован кулачковый механизм минимальных размеров обеспечивающий движение толкателя по заданному закону. Угол давления во всех положениях не превышает заданную допустимую величину
В течении всего цикла установившегося движения уравновешивающий момент имеет постоянную величину , совпадающую со значением приведенного момента движущих сил получаем при исследовании динамики машины (раздел 2).
Содержание проекта курсового
1.Описание работы машины
2. Динамический синтез машины в установившемся режиме движения
2.1. Задачи динамического синтеза и анализа машины
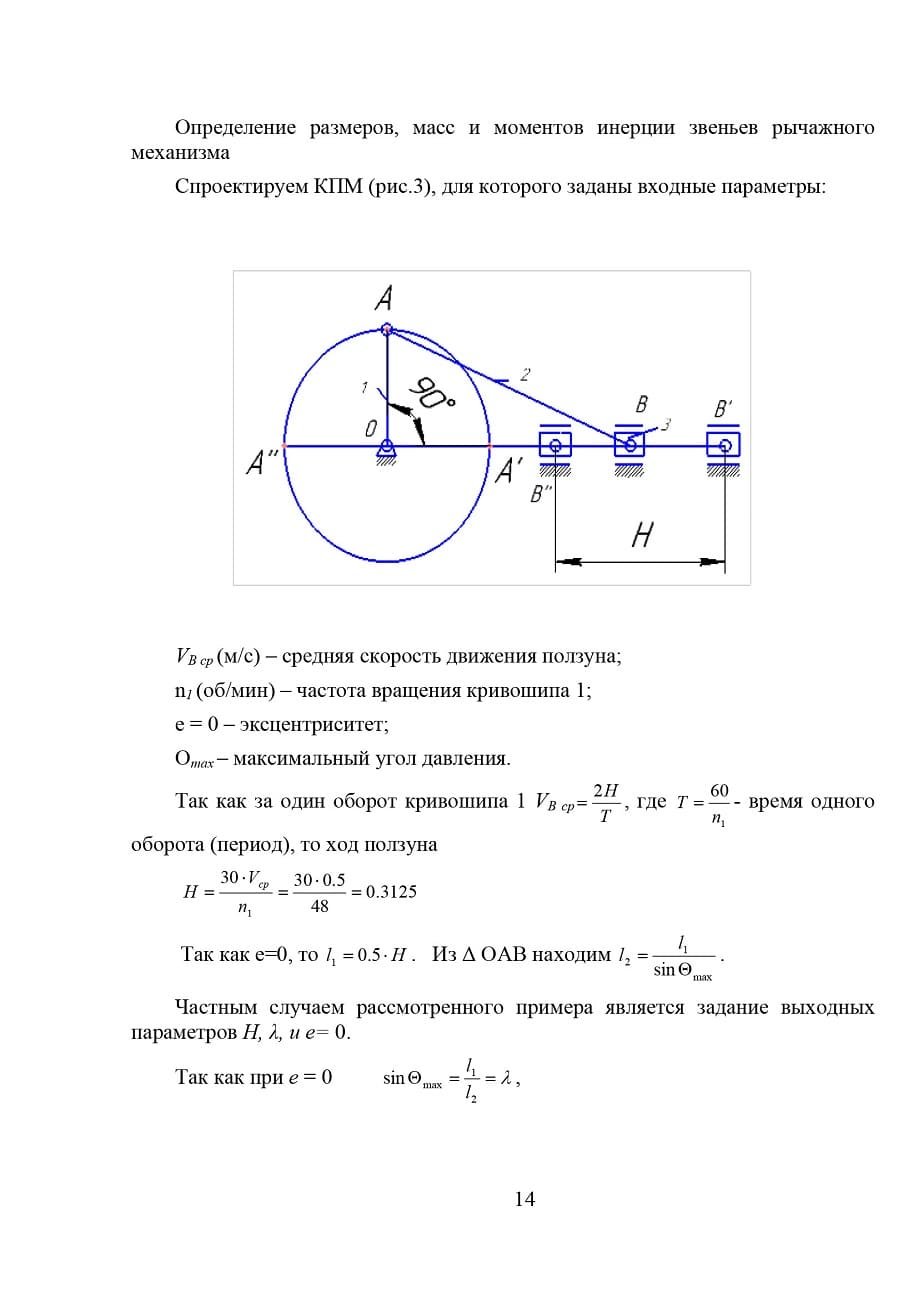
2.2. Определение размеров, масс и моментов инерции звеньев рычажного механизма
2.3 Структурный анализ механизма
2.4 Определение кинематических характеристик рычажного механизма
2.4.1 Построение планов положений
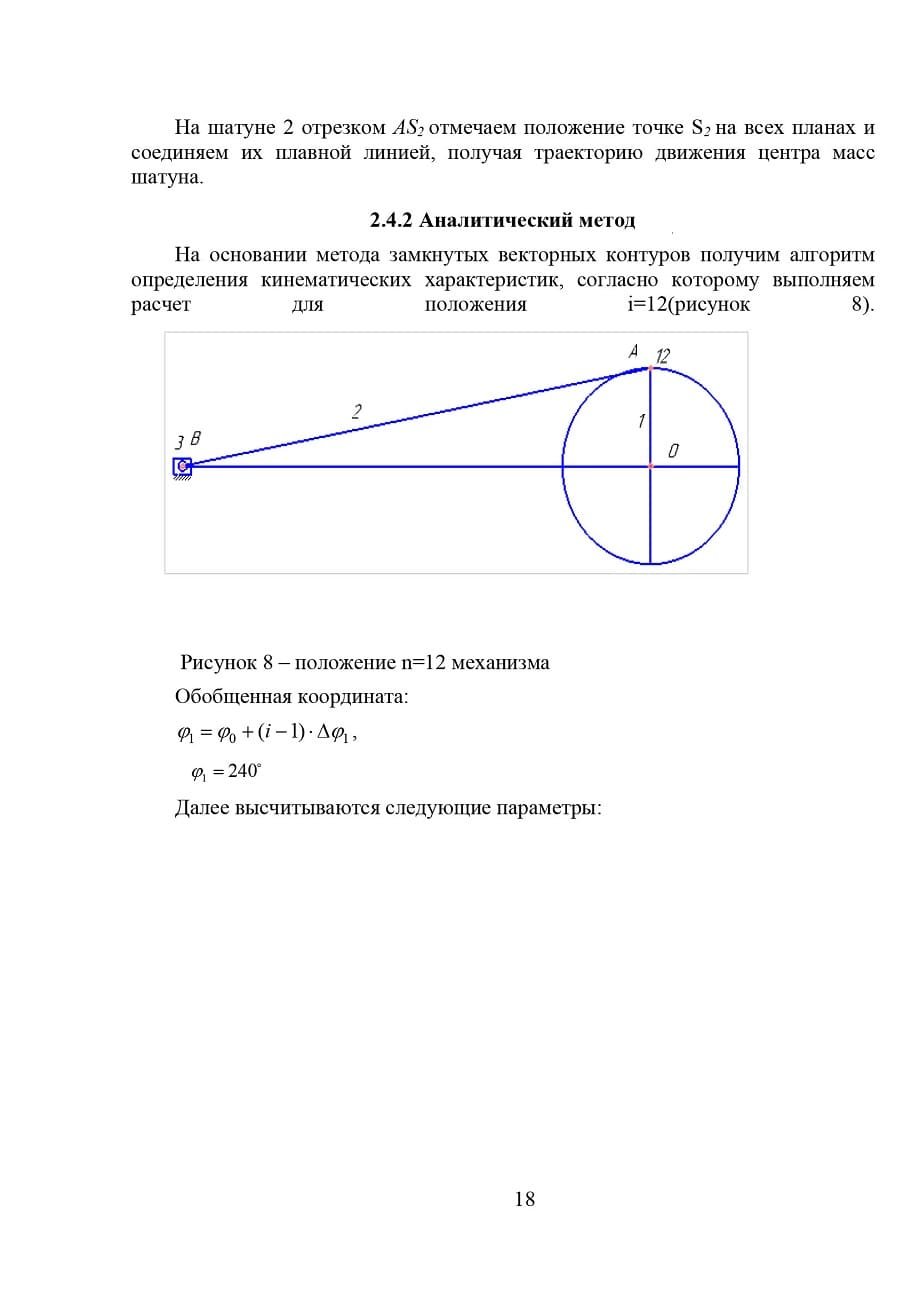
2.4.2 Аналитический метод
2.4.3 Графический метод
2.5 Определение сил полезного сопротивления
2.6 Динамическая модель машины
2.7 Определение приведенных моментов сил
2.8 Определение переменной составляющей приведенного момента инерции и его производной
2.9 Определение постоянной составляющей приведенного момента инерции и момента инерции маховика
2.10 Определение закона вращения звена приведения
2.11 Схема алгоритма программы исследования динамической нагруженности машинного агрегата
2.12 Исходные данные для компьютерных расчетов
2.13 Обработка результатов расчетов
2.14 Выводы
3. Динамический анализ рычажного механизма
3.1 Задачи динамического анализа механизма
3.2 Графический метод
3.2.1 Кинематический анализ
3.2.2 Силовой анализ
3.3 Аналитический метод
3.3.1 Кинематический анализ
3.3.2. Силовой анализ
3.4 Исходные данные для выполнения расчетов с помощью программы “Динамический анализ кривошипно-ползунных механизмов”
3.5. Обработка результатов расчета
3.6. Выводы
4. Проектирование кулачкового механизма
4.1Задачи проектирования и исходные данные
4.1.1. Исходные данные для проектирования. Алгоритмы и расчеты для контрольных положений
4.1.1.1. Кинематические характеристики
4.1.1.2. Основные размеры кулачкового механизма
4.1.1.3. Полярные координаты центрального профиля
4.1.1.4. Определение углов давления
4.1.2Обработка результатов вычислений на ЭВМ и их анализ
4.1.2.1 Построение графиков кинематических характеристик
4.1.2.2. Построение графика угла удаления
4.1.2.3 Построение полной и упрощенной совмещенных диаграмм
4.1.2.4 Построение центрального профиля кулачка
4.1.2.5. Определение радиуса ролика и построение действительного профиля кулачка
4.2 Вывод
| Тип проекта |
Курсовой проект |
Кол-во листов (чертежей) |
| Формат |
AutoCAD, dwg, word, doc, pdf |
2(60) |






 Анализ и синтез механизмов сложной технической системы
Анализ и синтез механизмов сложной технической системы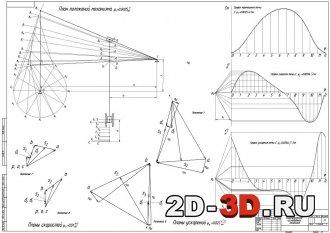 Анализ механизма стана холодной калибровки труб
Анализ механизма стана холодной калибровки труб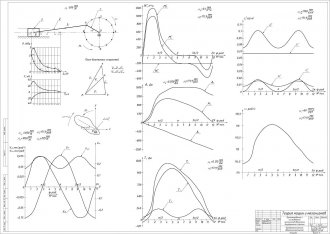 Проектирование и исследование механизмов двигателя внутреннего сгорания
Проектирование и исследование механизмов двигателя внутреннего сгорания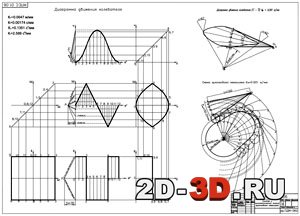 Механизм поперечно-строгального станка МПСС 01.06
Механизм поперечно-строгального станка МПСС 01.06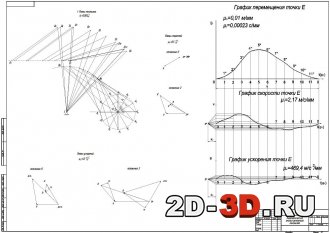 Анализ и синтез механизмов технологической машины строгальный станок
Анализ и синтез механизмов технологической машины строгальный станок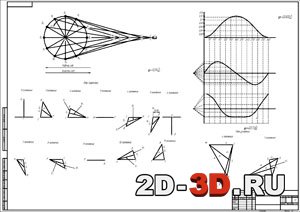 Исследование кривошипно-ползунного механизма двигателя внутреннего сгорания
Исследование кривошипно-ползунного механизма двигателя внутреннего сгорания