
| Тип проекта | Учебный | Кол-во листов (чертежей) |
| Формат | Компас, Word, cdw, docx | 21 (2) |
Анализ механизма стана холодной калибровки труб
Курсовой проект
Список чертежей
1. Кинематическое исследование механизма
2. Силовой расчет рычажного механизма
Исходные данные
Наименование параметров | Обозначение | Размерность | Значение |
Угловая скорость вращения кривошипа | ?1 | рад/с | 5 |
Линейные размеры механизма | lOA | м | 0,17 |
lAB | м | 0,34 | |
lBC | м | 0,80 | |
x1 | м | 0,74 | |
x2 | м | 0,30 | |
y | м | 0,20 | |
Массы звеньев | m2 | кг | 20 |
m3 | кг | 85 | |
m5 | кг | 1000 | |
Моменты инерции звеньев | JS2 | кгм2 | 0,13 |
JS3 | кгм2 | 0,30 | |
Jd | кгм2 | 0,06 | |
Сила сопротивления | Fс1 | Н | 13 000 |
Fс1 | Н | 975 |
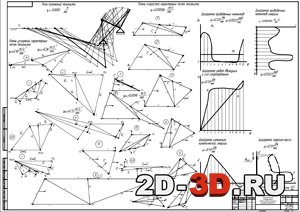
В состав исполнительного механизма стана холодной калибровки труб входят 6 звеньев: стойка 0, кривошип 1, шатун 2, кулиса 3, кулисный камень 4, ползун 5.
Входное звено механизма – кривошип 1, выходное – ползун 5.
Механическая энергия от привода станка сообщается кривошипу 1. Движение от кривошипа 1 через шатун 2 передается кулисе 3. Кривошип вращается вокруг неподвижной оси О, кулиса 3 совершает возвратно-вращающееся движение вокруг неподвижной оси С.
Движение кулисы 3 через кулисный камень 4 сообщается ползуну 5. Ползун совершает возвратно-поступательное движение относительно оси DE. Кулисный камень 4 совершает сложное движение: переносное вращательное вместе с кулисой 3 и относительное поступательное вдоль кулисы 3.
Рабочий ход механизма – движение ползуна 5 сверху вниз.
Холостой ход механизма – движение ползуна 5 снизу вверх.
Данный механизм состоит из шести звеньев (0, 1, 2, 3, 4, 5).
Звенья механизма образуют семь кинематических пар:
0-1, 1-2, 2-3, 0-3, 4-5 – вращательные, одноподвижные, пятого класса;
0-5, 3-4 – поступательные, одноподвижные, пятого класса.
Все кинематические пары механизма являются низшими.
Все звенья механизма движутся в параллельных плоскостях. Механизм является плоским и содержит два замкнутых кинематических контура (0-1-2-3-0 и 0-3-4-5-0).
В механизме 4 избыточных связи типа Б и 5 избыточных связей типа В.
В соответствии с принципом Ассура выделим начальный механизм, обладающий числом степеней свободы всего исследуемого механизма. Этот механизм - кривошипный, состоит из стойки 0 и кривошипа1.
Остальные звенья образуют ведомую цепь, которая имеет нулевую подвижность относительно звеньев начального механизма.
Ведомая цепь состоит из двух структурных групп первого класса второго порядка: ВВВ и ПВП (2-3 и 4-5).
Содержание пояснительной записки
Исходные данные
1. Описание работы механизма по кинематической схеме
2. Структурный анализ механизма
3. Кинематический механизм
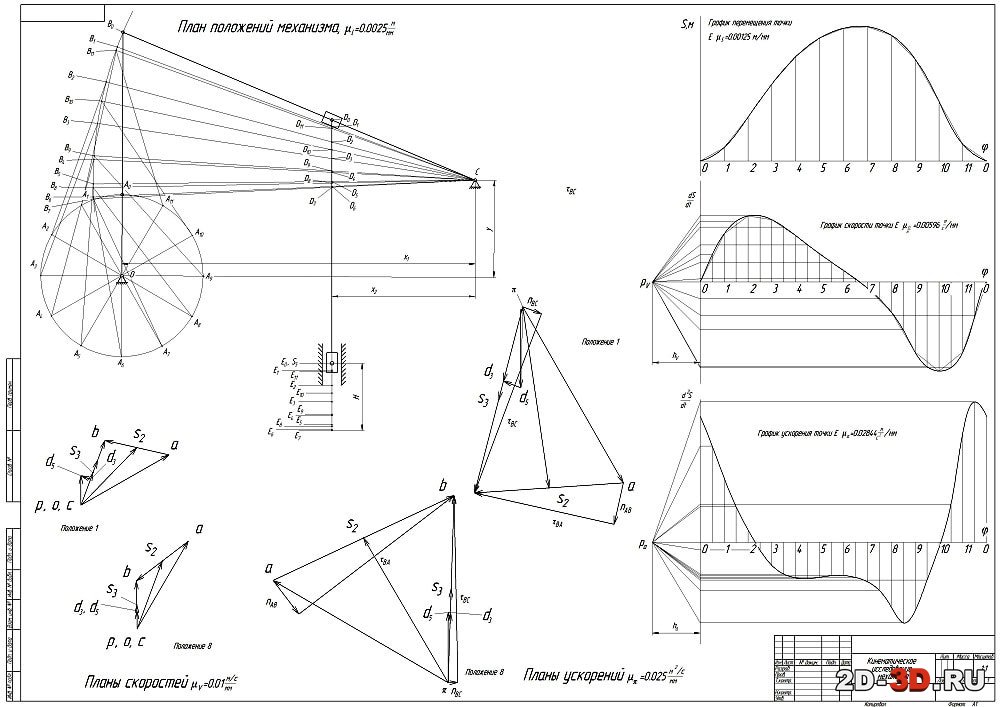
3.1 Построение планов положений
3.2 Определение скоростей и ускорений методом кинематических диаграмм
3.3 Построение плана скоростей
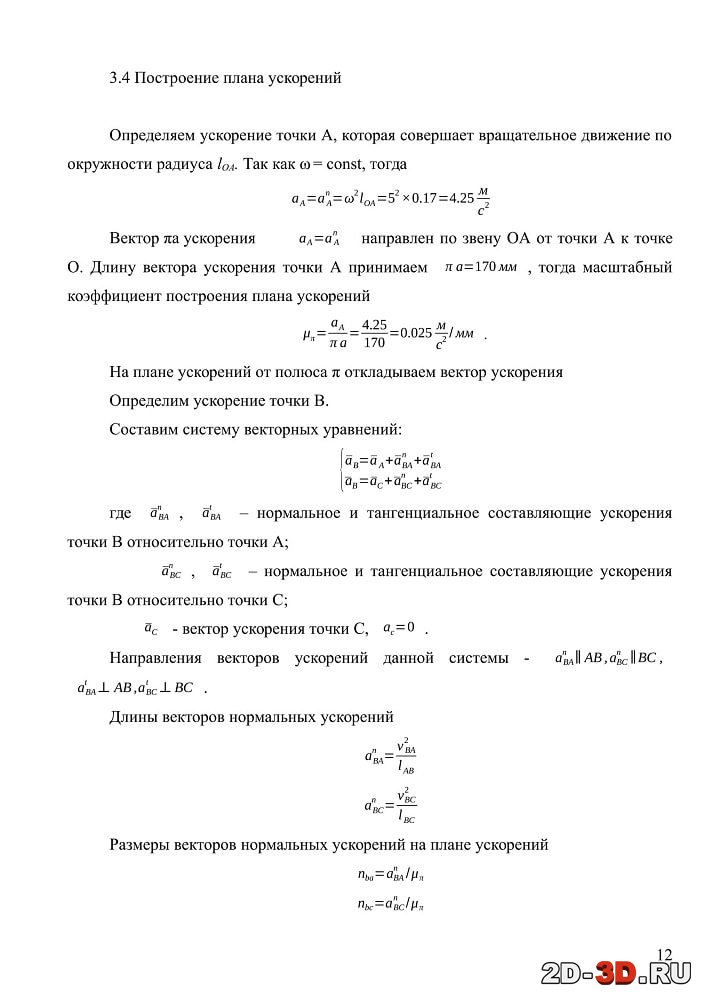
3.4 Построение плана ускорений
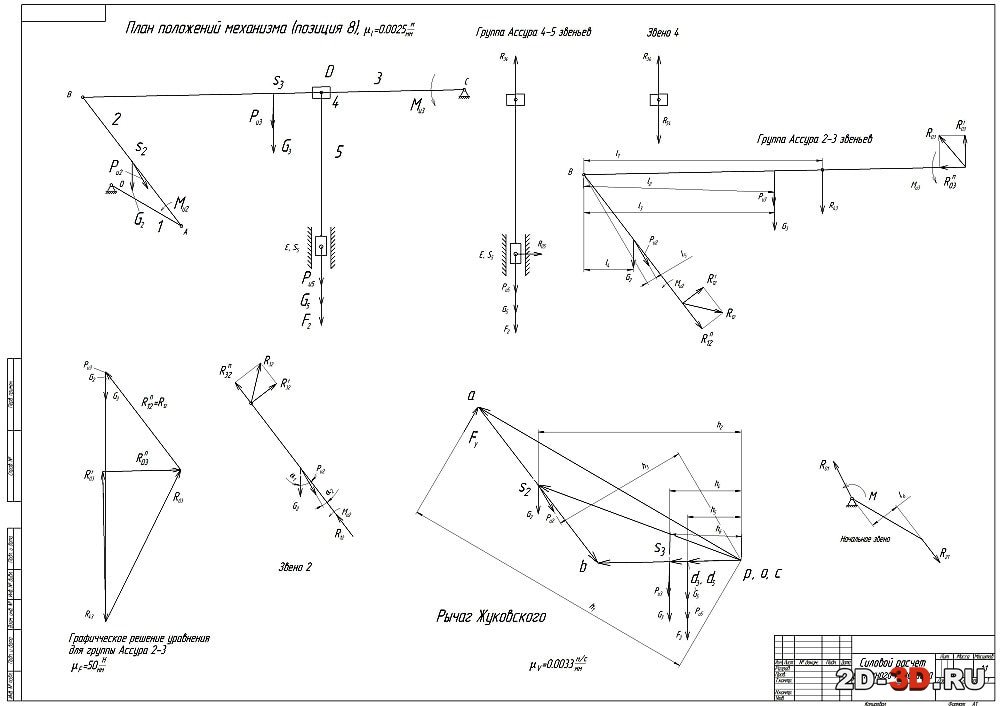
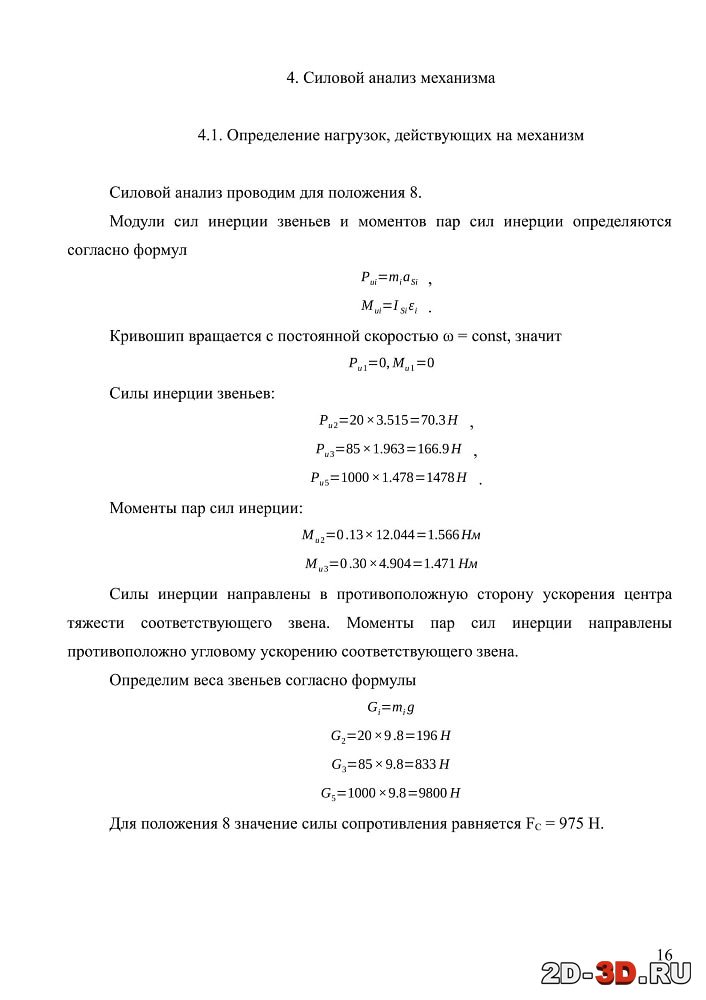
4. Силовой анализ механизма
4.1. Определение нагрузок, действующих на механизм
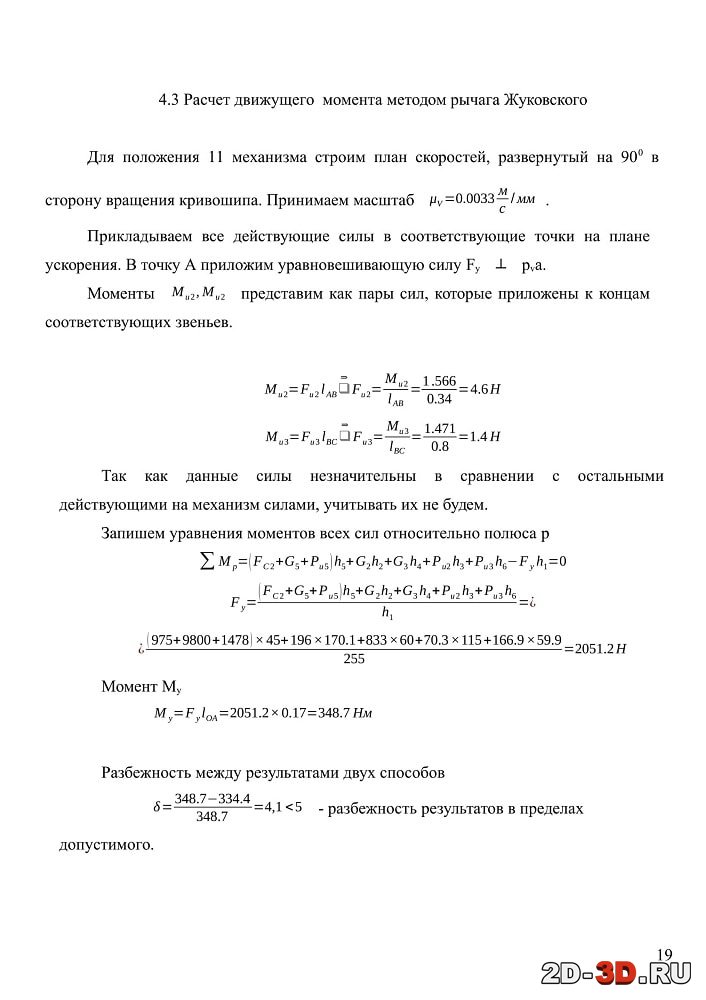
4.2 Определение реакций и обобщенного движущего момента методом векторных планов
Список литературы
Скачать:
| Тип проекта | Учебный | Кол-во листов (чертежей) |
| Формат | Компас, Word, cdw, docx | 21 (2) |
 Анализ и синтез механизмов сложной технической системы
Анализ и синтез механизмов сложной технической системы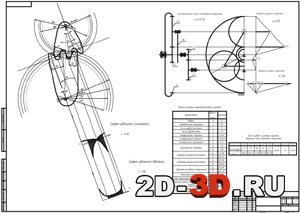 Проектирование и исследование механизмов колесного трактора
Проектирование и исследование механизмов колесного трактора Кривошипно-ползуновый механизм Курсовой проект Вариант 1
Кривошипно-ползуновый механизм Курсовой проект Вариант 1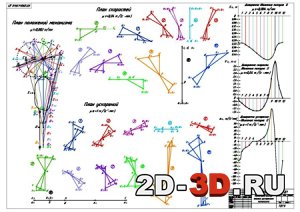 Курсовой по ТММ тема 4 вариант 0
Курсовой по ТММ тема 4 вариант 0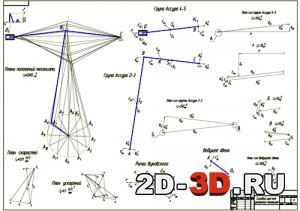 Курсовой проект по ТММ рисунок 3 вариант 9
Курсовой проект по ТММ рисунок 3 вариант 9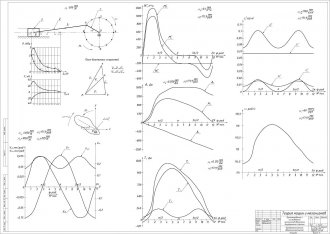 Проектирование и исследование механизмов двигателя внутреннего сгоранияАнализ и синтез механизмов сложной технической системыПроектирование и исследование механизмов колесного трактораКривошипно-ползуновый механизм Курсовой проект Вариант 1Курсовой по ТММ тема 4 вариант 0Курсовой проект по ТММ рисунок 3 вариант 9Проектирование и исследование механизмов двигателя внутреннего сгорания
Проектирование и исследование механизмов двигателя внутреннего сгоранияАнализ и синтез механизмов сложной технической системыПроектирование и исследование механизмов колесного трактораКривошипно-ползуновый механизм Курсовой проект Вариант 1Курсовой по ТММ тема 4 вариант 0Курсовой проект по ТММ рисунок 3 вариант 9Проектирование и исследование механизмов двигателя внутреннего сгорания