Формат файлов: Компас, AutoCAD, Word, cdw, dwg, docx
Кол-во чертежей: 3
Категории: Чертежи проекты / ТММ
| Тип проекта |
Учебный |
Кол-во листов (чертежей) |
| Формат |
Компас, AutoCAD, Word, cdw, dwg, docx |
90 (3) |
Анализ
и синтез механизмов сложной технической системы
Курсовой
проект
Список
чертежей: кинематический и динамический анализ плоского рычажного
механизма, силовой анализ плоского
рычажного механизма, анализ и синтез механизмов с высшими кинематическими
парами.
Порядок
выполнения
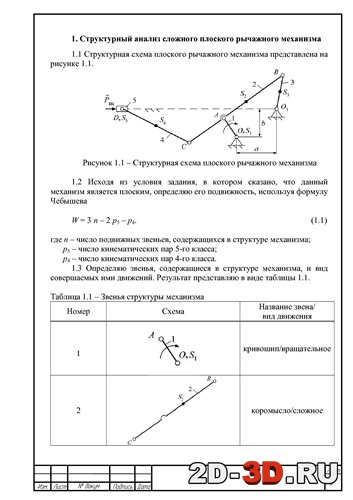
1 Структурный анализ сложного плоского
рычажного механизма
1.1 Вычертить структурную схему
механизма;
1.2 Выбрать структурную формулу
соответствующую заданной структурной схеме механизма;
1.3 Определить вид совершаемого движения
и количество вершин подвижных звеньев (результат представить в виде таблицы);
1.4 Определить название, класс,
подвижность, вид контакта и замыкания всех кинематических пар (результат
представить в виде таблицы);
1.5 Определить число и вид
кинематической цепи, выявить количество элементов стойки (число присоединений
подвижных звеньев к стойке);
1.6 Обосновав значения коэффициентов,
определить подвижность (степень подвижности) механизма;
1.7 Выявить класс, вид и порядок
структурных групп звеньев, а также число и подвижность первичных механизмов
(групп начальных звеньев);
1.8 Сформировать модель состава
структуры и определить класс механизма;
1.9 Провести проверку полученных
результатов.
2 Метрический синтез кинематической
схемы сложного плоского рычажного
механизма по заданным параметрам
2.1 Выбрать масштабный коэффициент длин.
2.2 Перевести все заданные
геометрические параметры механизма (рисунок 1), имеющие размерность длин м, в
масштабный коэффициент.
2.3 Выявить траектории движения всех
характерных точек механизма.
2.4 По полученным значениям в выбранном
масштабном коэффициенте определить крайние (граничные) положения выходных
звеньев типового механизма, лежащего в основе структуры сложного плоского рычажного
механизма.
2.5 Обосновав выбор начального
положения, построить кинематические
схемы для обоих крайних (граничных) положений сложного плоского рычажного
механизма.
2.6 Исходя из выбранного начало
отсчета, построить план положений
плоского рычажного механизма для 12(13) положений начального звена.
2.7 Определив величины фазовых углов
рабочего и холостого ходов, выполнить проверку условия эффективной эксплуатации
механизмов (при
невыполнении условия провести смену
нумерации положений механизма).
2.8 Определить ход всех ползунов и
коэффициент неравномерности средней
скорости сложного плоского рычажного механизма.
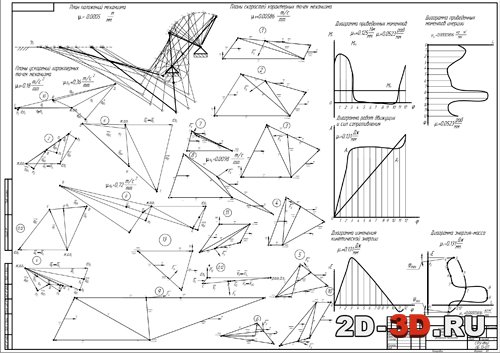
3 Кинематический анализ сложного
плоского рычажного механизма
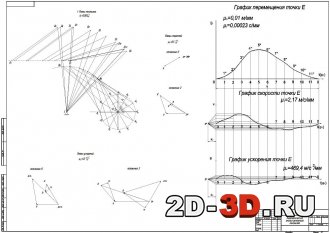
3.1 Определить характерные точки
механизма;
3.2 Составить векторные уравнения,
характеризующие распределение скоростей между характерными точками механизма;
3.3 Выбрать масштабный коэффициент
скоростей;
3.4 Решая векторные уравнения, построить
планы скоростей для каждого положения ведущего (входного) звена;
3.5 Определить значения скоростей
характерных точек, а также величины и направления действия угловых скоростей
всех звеньев механизма для каждого положения ведущего (входного) звена;
3.6 Составить векторные уравнения,
характеризующие распределение ускорений между характерными точками механизма;
3.7 Выбрать масштабный коэффициент
ускорений;
3.8 Решая векторные уравнения, построить
планы ускорений для каждого положения ведущего (входного) звена;
3.9 Определить значения ускорений
характерных точек, а также величины и направления действия угловых ускорений
всех звеньев механизма для каждого положения ведущего (входного) звена;
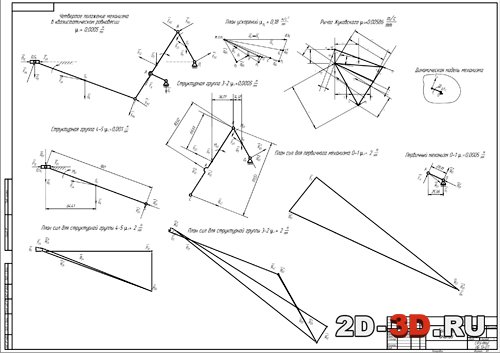
4 Силовой анализ сложного плоского
рычажного механизма
4.1 Определить значения и направления
силовых факторов, действующих на звенья механизма, т.е. сил тяжести, сил и
моментов пар сил инерции;
4.2 Выполнить синтез расчетной модели
(схемы), установив для механизма квазистатическое равновесие;
4.3 Выполнить синтез динамической модели
сложного плоского рычажного механизма для силового анализа;
4.4 Выполнить синтез повернутого плана
скоростей;
4.5 Используя теорему Жуковского,
перенести все силовые факторы с расчетной модели (схемы) в одноименные точки
повернутого плана скоростей;
4.6 Определить значение силового
управляющего воздействия;
4.7 Согласно модели состава структуры
плоского рычажного механизма вычертить в масштабном коэффициенте длин
структурные группы звеньев и первичный механизм для заданного положения
ведущего звена;
4.8 Приложить к звеньям структурных
групп и первичного механизма вектора сил и моменты пар сил, сохраняя их
направление и линии действия
согласно расчетной модели (схемы)
механизма;
4.9 Структурная группа звеньев 5-4
4.10 Структурная группа звеньев 3-2
4.11 Первичный механизм 0-1
4.12 Определить значение
уравновешивающего момента пары сил;
4.13 Определить погрешность вычислений;
5 Динамический анализ сложного плоского
рычажного механизма
5.1 Для каждого ползуна в соответствии с
величиной фазового угла рабочего хода определить положения механизма, в которых
при определении значений приведенного момента пары сил необходимо учесть
действие сил полезного сопротивления;
5.2 Выполнить синтез динамической модели
сложного плоского рычажного механизма для динамического анализа;
5.3 Синтез диаграммы приведенного
момента сил механизма
5.4 Осуществив графические
преобразования диаграммы приведенных моментов пар сил, выполнить синтез
диаграммы работ и вычислить значение масштабного коэффициента оси работ
(результат вычислений представить в виде таблицы);
5.5 Выбрав значение масштабного
коэффициента оси изменения кинетической энергии (разности работ), выполнить
синтез диаграммы изменения кинетической энергии (разности работ), используя
метод графического вычитания (результат вычислений представить в виде таблицы);
5.6 Синтез диаграммы приведенного
момента инерции механизма
5.7 Методом графического исключения угла
поворота звена приведения, выполнить синтез диаграмм «энергия-приведенный
момент инерции» и «энергия-масса»;
5.8 Вычислив значения углов наклона,
провести касательные к замкнутой кривой на диаграммах «энергия-приведенный
момент инерции» и «энергия-масса» (значение коэффициента неравномерности хода
выбрать из таблицы согласно приложению 1);
5.9 Определить значения момента инерции
маховой массы;
6 Анализ и синтез простого плоского
зубчатого механизма
6.1 Вычертить структурную схему
механизма;
6.2 В соответствии с признаками
классификации простых зубчатых механизмов, установить тип заданной схемы
механизма;
6.3 Выбрать структурную формулу,
соответствующую заданной структурной схеме механизма;
6.4 Определить название и вид
совершаемого движения звеньев (результат представить в виде таблицы);
6.5 Выявить название, класс,
подвижность, вид контакта и замыкания всех кинематических пар (результат
представить в виде таблицы);
6.6 Выполнив модификацию кинематических
пар, исключить дефекты структуры (результат представить в виде таблицы);
6.7 Определить число и вид
кинематической цепи, выявить количество элементов стойки (число присоединений
подвижных звеньев к стойке);
6.8 Обосновав значения коэффициентов, определить
подвижность (степень подвижности) механизма.
6.9 Определить величины дополнительных
исходных данных;
6.10 Вычислить значения геометрических
параметров эвольвентных зубчатых колес и эвольвентного зацепления;
6.11 Провести проверку правильности
вычислений;
6.12 Выбрать масштабный коэффициент
длин;
6.13 Перевести все вычисленные значения
геометрических параметров эвольвентных зубчатых колес и эвольвентного
зацепления в масштабный коэффициент длин;
6.14 Определить радиус сопряжения
переходной кривой;
6.15 По полученным значениям в выбранном
масштабном коэффициенте длин выполнить метрический синтез эвольвентного
зацепления зубчатых колес простого плоского зубчатого механизма;
6.16 Выполнить метрический синтез
кинематической схемы простого плоского зубчатого механизма;
7 Анализ и синтез сложного плоского
зубчатого механизма:
7.1 Вычертить структурную схему и
начиная с ведущего звена шестерни 1, обозначить буквами латинского алфавита
подвижные соединения звеньев, содержащиеся в структуре механизма;
7.2 Согласно классификации сложных
зубчатых механизмов, установить тип заданной схемы механизма;
7.3 Выбрать структурную формулу,
соответствующую заданной структурной схеме механизма;
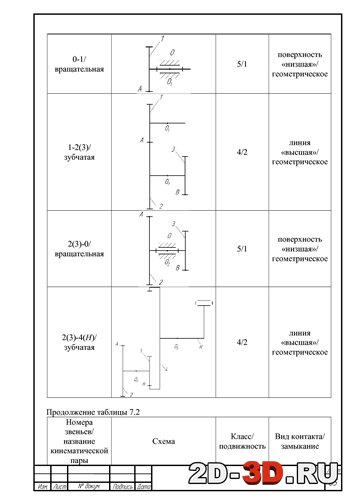
7.4 Определить название и вид
совершаемого движения звеньев (результат представить в виде таблицы);
7.5 Выявить название, класс,
подвижность, вид контакта и замыкания всех кинематических пар (результат
представить в виде таблицы);
7.6 Определить число и вид
кинематической цепи, выявить количество элементов стойки (число присоединений
подвижных звеньев к стойке);
7.7 Обосновав значения коэффициентов,
определить подвижность (степень подвижности) механизма;
7.8 Определить числа зубьев всех колес
механизма;
7.9 Рассчитать диаметры начальных
(делительных) окружностей колес;
7.10 Выбрать масштабный коэффициент
длин;
7.11 Переведя вычисленные значения
диаметров начальных (делительных) окружностей колес в масштабный коэффициент
длин, выполнить метрический синтез кинематической схемы механизма;
7.12 Определить характерные точки
механизма;
7.13 Выбрав масштабные коэффициенты осей
длин и линейных скоростей, выполнить синтез планов линейных и угловых
скоростей;
7.14 Вычислить значения линейных
скоростей характерных точек и угловых скоростей звеньев;
7.15 Вычислить фактические прямое и
обратное передаточные отношения механизма и определить погрешность вычислений.
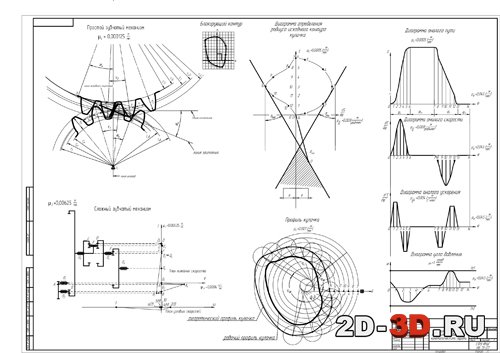
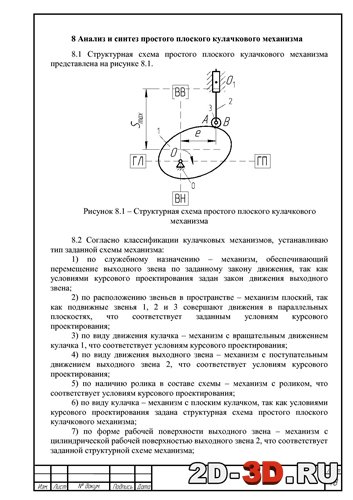
8 Анализ и синтез простого плоского
кулачкового механизма;
8.1 Вычертить структурную схему
механизма;
8.2 Согласно классификации кулачковых
механизмов, установить тип заданной схемы механизма;
8.3 Выбрать структурную формулу,
соответствующую заданной структурной схеме механизма;
8.4 Определить название и вид
совершаемого движения звеньев (результат представить в виде таблицы);
8.5 Выявить название, класс,
подвижность, вид контакта и замыкания всех кинематических пар (результат
представить в виде таблицы);
8.6 Выполнив модификацию кинематических
пар, исключить дефекты структуры (результат представить в виде таблицы);
8.7 Определить число и вид
кинематической цепи, выявить количество элементов стойки;
8.8 Обосновав значения коэффициентов,
определить подвижность (степень подвижности) механизма;
8.9 Выбрав необходимое количество
текущих точек на фазах удаления и сближения, вычислить величины аналогов пути,
скорости и ускорения по заданным функциональным зависимостям (согласно
приложению 3, результат вычислений представить в виде таблицы);
8.10 Выбрать масштабные коэффициенты
осей угла поворота кулачка и аналогов пути, скорости и ускорения, перевести
значения угла поворота кулачка, аналогов пути, скорости и ускорения в
масштабные коэффициенты;
8.11 Выполнить синтез диаграмм аналогов
пути, скорости и ускорения;
8.12 Выполнить синтез диаграммы
функциональной зависимости аналога пути от аналога скорости и определить
величину радиуса исходного контура кулачка;
8.13 Найти значения углов давления для
выбранных положений кулачка (результат вычислений представить в виде таблицы);
8.14 Определив масштабный коэффициент и
переведя значения в масштабный коэффициент, выполнить синтез диаграммы углов;
8.15 Провести проверку правильности
выполняемых действий;
8.16 Выбрав масштабный коэффициент длин,
выполнить метрический синтез теоретического профиля кулачка;
8.17 Определить величину радиуса ролика;
8.18 С учетом полученного значения
выполнить метрический синтез конструктивного профиля кулачка и кинематической
схемы простого плоского кулачкового механизма.
Содержание
пояснительной записки
Порядок
выполнения
1.
Структурный анализ сложного плоского рычажного механизма
2. Метрический
синтез кинематической схемы сложного плоского рычажного механизма
3.
Кинематический анализ сложного плоского рычажного механизма
4.
Силовой анализ сложного плоского рычажного механизма
5 Динамический
анализ сложного плоского рычажного механизма
6
Анализ и синтез простого плоского зубчатого механизма
7 Анализ
и синтез сложного плоского зубчатого механизма
8
Анализ и синтез простого плоского кулачкового механизма
Список
использованных источников
| Тип проекта |
Учебный |
Кол-во листов (чертежей) |
| Формат |
Компас, AutoCAD, Word, cdw, dwg, docx |
90 (3) |

 Анализ и синтез механизмов технологической машины строгальный станок
Анализ и синтез механизмов технологической машины строгальный станок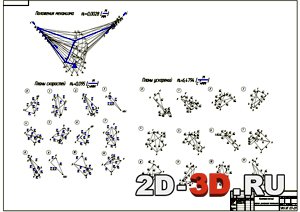 Курсовой проект по ТММ. Схема 10, вариант 9.
Курсовой проект по ТММ. Схема 10, вариант 9.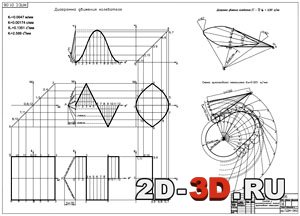 Механизм поперечно-строгального станка МПСС 01.06
Механизм поперечно-строгального станка МПСС 01.06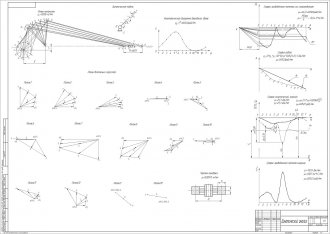 Механизмы качающегося конвейера курсовой по ТММ
Механизмы качающегося конвейера курсовой по ТММ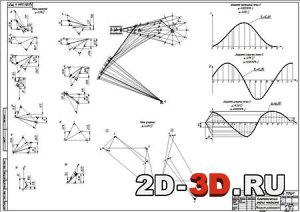 Расчет рычажного, планетарного и кулачкового механизма.
Расчет рычажного, планетарного и кулачкового механизма.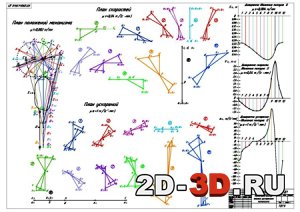 Курсовой по ТММ тема 4 вариант 0
Курсовой по ТММ тема 4 вариант 0