Формат файлов: AutoCAD, Word, dwg, doc
Кол-во чертежей: 4
Теги: Строгальный
Категории: Станки / ТММ
| Тип проекта |
Учебный |
Кол-во листов (чертежей) |
| Формат |
AutoCAD, Word, dwg, doc |
26 (4) |
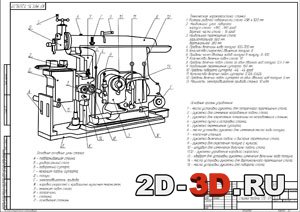
Механизм поперечно-строгального станка МПСС 01.06
Курсовой проект
Список чертежей: синтез и кинематический анализ рычажного механизма, синтез и кинематический анализ зубчатого механизма, синтез и кинематический анализ кулачкового механизма, силовой анализ рычажного механизма.
Поперечно-строгальный станок предназначен для строгания плоских поверхностей. Привод станка состоит из простой зубчатой передачи и планетарной передачи, который соединен с электромотором.
Резание металла осуществляется резцом, установленным в резцовой головке, закреплённой на ползунке, при рабочем ходе ползунка.
Кривошип жёстко соединен с зубчатым колесом. Во время перебега в конце холостого хода осуществляется перемещение стола с заготовкой на величину подачи с помощью храпового механизма и кулачкового механизма, кулачёк которого жестко соединен с зубчатым колесом.
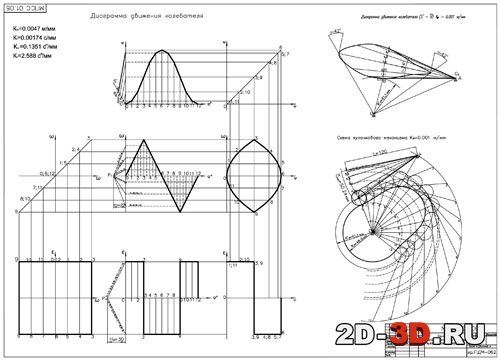
При проектировании профиля кулачка необходимо обеспечить заданный закон движения колебателя.
Содержание пояснительной запискиВведение
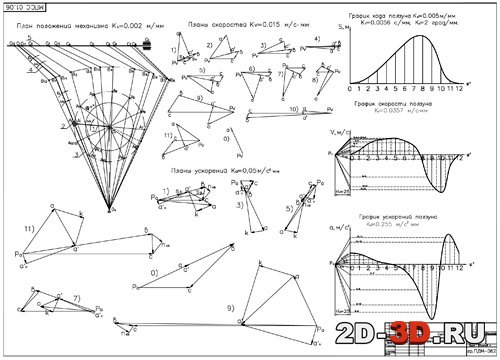
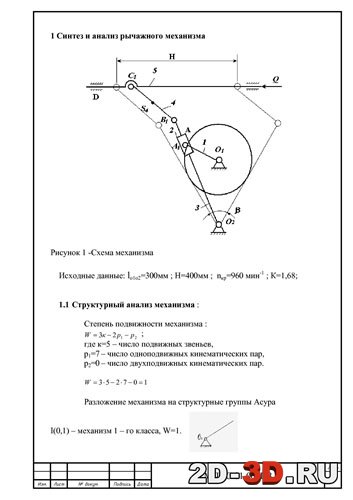
1 Синтез и анализ рычажного механизма
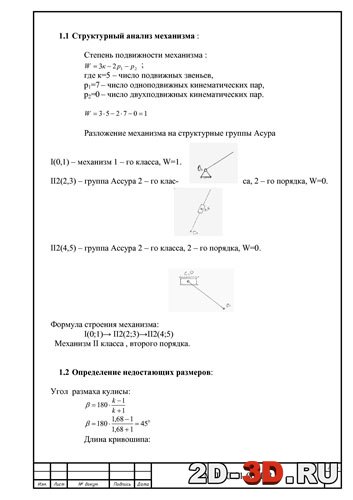
1.1 Структурный анализ механизма
1.2 Определение недостающих размеров
1.3 Определение скоростей точек механизма
1.4 Определение ускорений точек механизма
1.5 Диаграммы движения выходного звена
1.6 Определение угловых скоростей и ускорений
1.7 Определение ускорений центров масс звеньев механизма
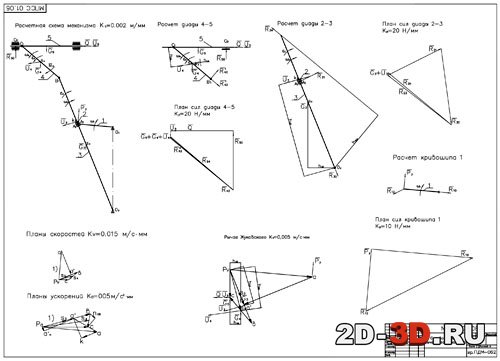
2 Силовой анализ механизма
2.1 Определение сил инерции и сил тяжести
2.2 Расчет диады 4-5
2.3 Расчет диады 2-3
2.4 Расчет кривошипа
2.5 Метод Жуковского
2.6 Определение мощностей
2.7 Определение кинетической энергии механизма
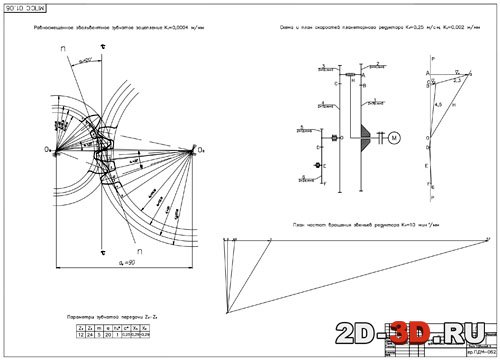
3 Проектирование зубчатого зацепления. Синтез планетарного редуктора
3.1 Геометрический расчет равно смещенного эвольвентного зубчатого зацепления
3.2 Синтез планетарной передачи
3.3 Определение частот вращения аналитическим методом
4 Синтез и анализ кулачкового механизма
4.1 Диаграммы движения толкателя
4.2 Выбор минимального радиуса кулачка
4.3 Построение профиля кулачка
4.4 Определение максимальной линейной скорости и ускорения толкателя
Заключение
Список использованных источников
| Тип проекта |
Учебный |
Кол-во листов (чертежей) |
| Формат |
AutoCAD, Word, dwg, doc |
26 (4) |


 Поперечно-строгальный станок СПС-01
Поперечно-строгальный станок СПС-01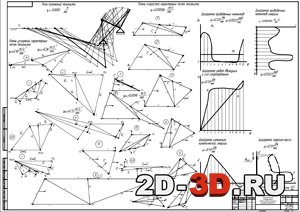 Анализ и синтез механизмов сложной технической системы
Анализ и синтез механизмов сложной технической системы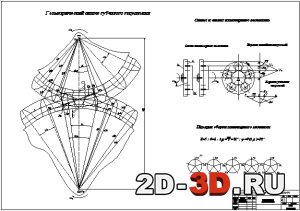 Синтез и анализ машинного агрегата (Инерционный конвейер)
Синтез и анализ машинного агрегата (Инерционный конвейер)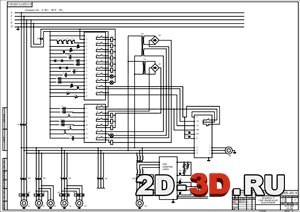 Модернизация плоскошлифовального станка
Модернизация плоскошлифовального станка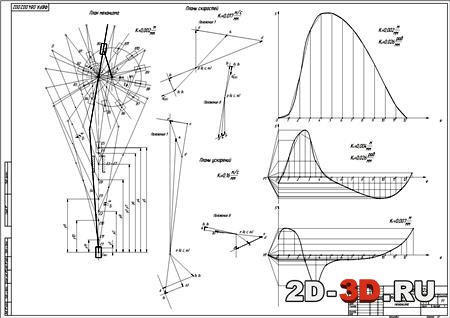 Поперечно- строгальный станок
Поперечно- строгальный станок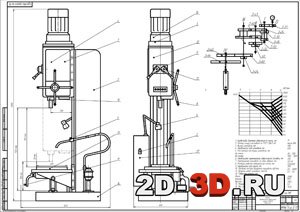 Станок вертикально-сверлильный с максимальным диаметром сверления 35 мм
Станок вертикально-сверлильный с максимальным диаметром сверления 35 мм