
| Тип проекта | Учебный | Кол-во листов (чертежей) |
| Формат | Компас, AutoCAD, Word, cdw, dwg, doc | 48 |
Расчет рычажного, планетарного и кулачкового механизма.
Курсовой проект
Скачать:
В составе чертежи: динамический анализ, кинематический анализ, кулачковый механизм, силовой анализ, зубчатый механизм.
Решение этих задач на начальной стадии проектирования состоит в выполнении анализа и синтеза проектируемого механизма, а также в разработке его кинематической схемы, обеспечивающей с достаточным приближением воспроизведение требуемого закона движения.
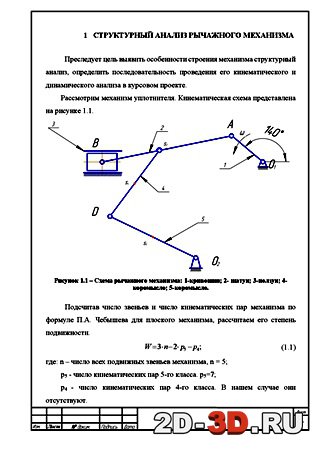
В первом разделе производится структурный анализ механизма. Рассматривается строение механизма на уровне звеньев и кинематических пар и подсчитываются степени подвижности. Механизм анализируется на уровне структурных групп.
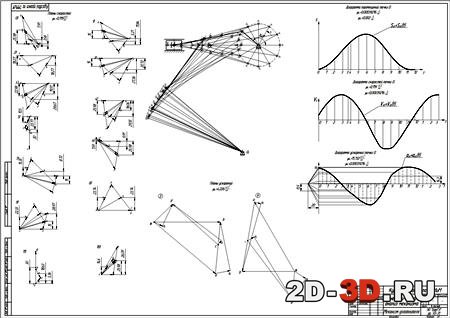
Во втором разделе производится кинематический анализ механизма нодяного насоса. Исследуются положения звеньев и траектории шарнирных точек и центров масс звеньев - графическим методом
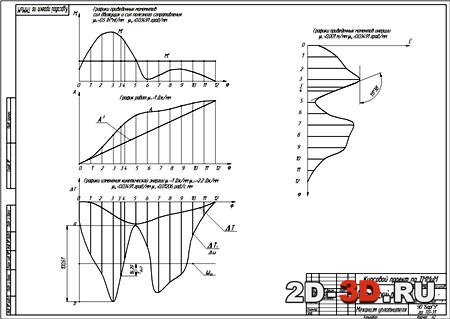
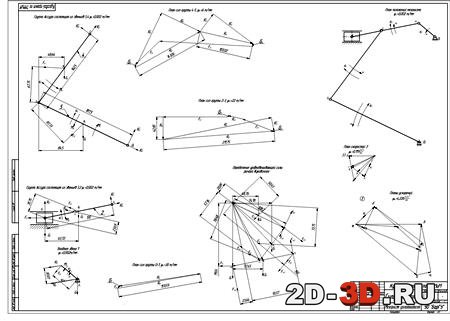
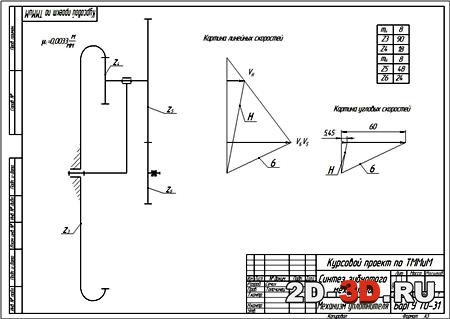
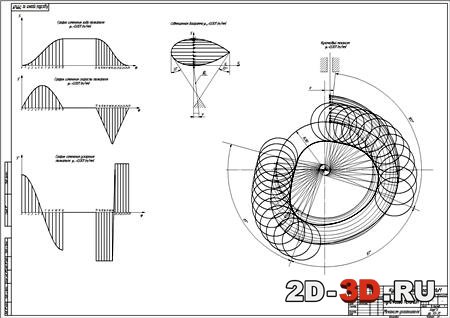
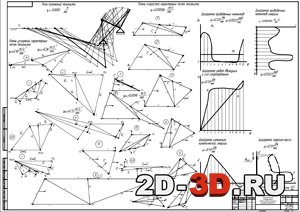
В третьем разделе исследуется динамическая нагруженность машинного агрегата в установившемся режиме движения. Строится план механизма, планы аналогов скоростей, графики приведённых моментов движущих сил и сил сопротивления, моментов инерции, графики работ и изменения кинетической энергии. В четвертом разделе производится силовой анализ рычажного механизма. Строится план скоростей и ускорений. Определяются силы, действующие на механизм в одном положении. В пятом разделе проводится синтез кулачкового механизма. Строятся графики ускорений, скоростей и перемещения толкателя кулачка аналитическим методом. Производится динамический синтез кулачкового механизма. Профилируется кулачок.
В шестом разделе проводится синтез зубчатого механизма.
СОДЕРЖАНИЕ РПЗ:
введение
1 структурный анализ рычажного механизма
2 кинематический анализ механизма
2.1 синтез (проектирование) рычажного механизма
2.2 построение планов положений механизма
2.3 построение планов скоростей и ускорений
2.4 построение кинематических диаграмм перемещений, скоростей, ускорений выходного звена
2.5 построение диаграммы скоростей
2.6 построение диаграммы ускорений
3 динамический анализ механизма
3.1 определение приведенного момента сил сопротивления и приведенного момента движущих сил
3.1.1 определение сил полезного (технологического сопротивления)
3.1.2 определение приведенного момента сопротивления
3.2 определение работы движущих сил
3.2.1 определение
3.3 определение переменной составляющей приведенного момента инерции
3.4 определение постоянной составляющей приведенного момента инерции и момента инерции маховика
3.5 определение закона движения звена приведения
4.1 построение планов скоростей и ускорений
4.2 определение сил инерции и моментов сил инерции звеньев
4.3 кинетостатический силовой анализ механизма
4.4 определение уравновешивающей силы методом жуковского
5 синтез кулачкового механизма
5.1 определение кинематических характеристик толкателя
5.2 определение основных размеров кулачкового механизма
4.3 построение профиля кулачка
6 проектирование планетарной передачи
6.1 задачи проектирования
6.2 подбор чисел зубьев и числа сателлитов планетарного механизма
6.3 расчет параметров эвольвентного зацепления
6.4 коэффициент полезного действия планетарного редуктора
заключение
литература
| Тип проекта | Учебный | Кол-во листов (чертежей) |
| Формат | Компас, AutoCAD, Word, cdw, dwg, doc | 48 |
 Анализ и синтез механизмов сложной технической системы
Анализ и синтез механизмов сложной технической системы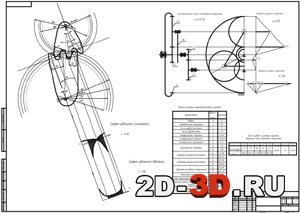 Проектирование и исследование механизмов колесного трактора
Проектирование и исследование механизмов колесного трактора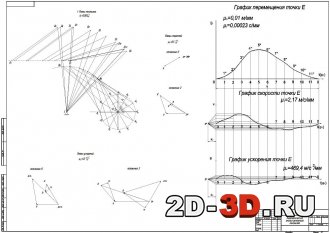 Анализ и синтез механизмов технологической машины строгальный станок
Анализ и синтез механизмов технологической машины строгальный станок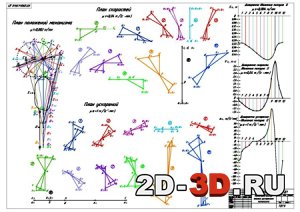 Курсовой по ТММ тема 4 вариант 0
Курсовой по ТММ тема 4 вариант 0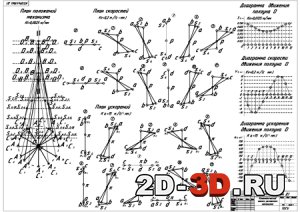 Курсовой по ТММ тема 6 вариант 4
Курсовой по ТММ тема 6 вариант 4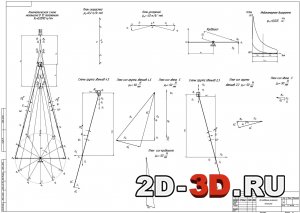 Исследование рычажного механизма
Исследование рычажного механизма