
| Тип проекта | Курсовой проект | Кол-во листов (чертежей) |
| Формат | cdw, Компас-3D, dwg, AutoCAD, pdf | 46 (2) |
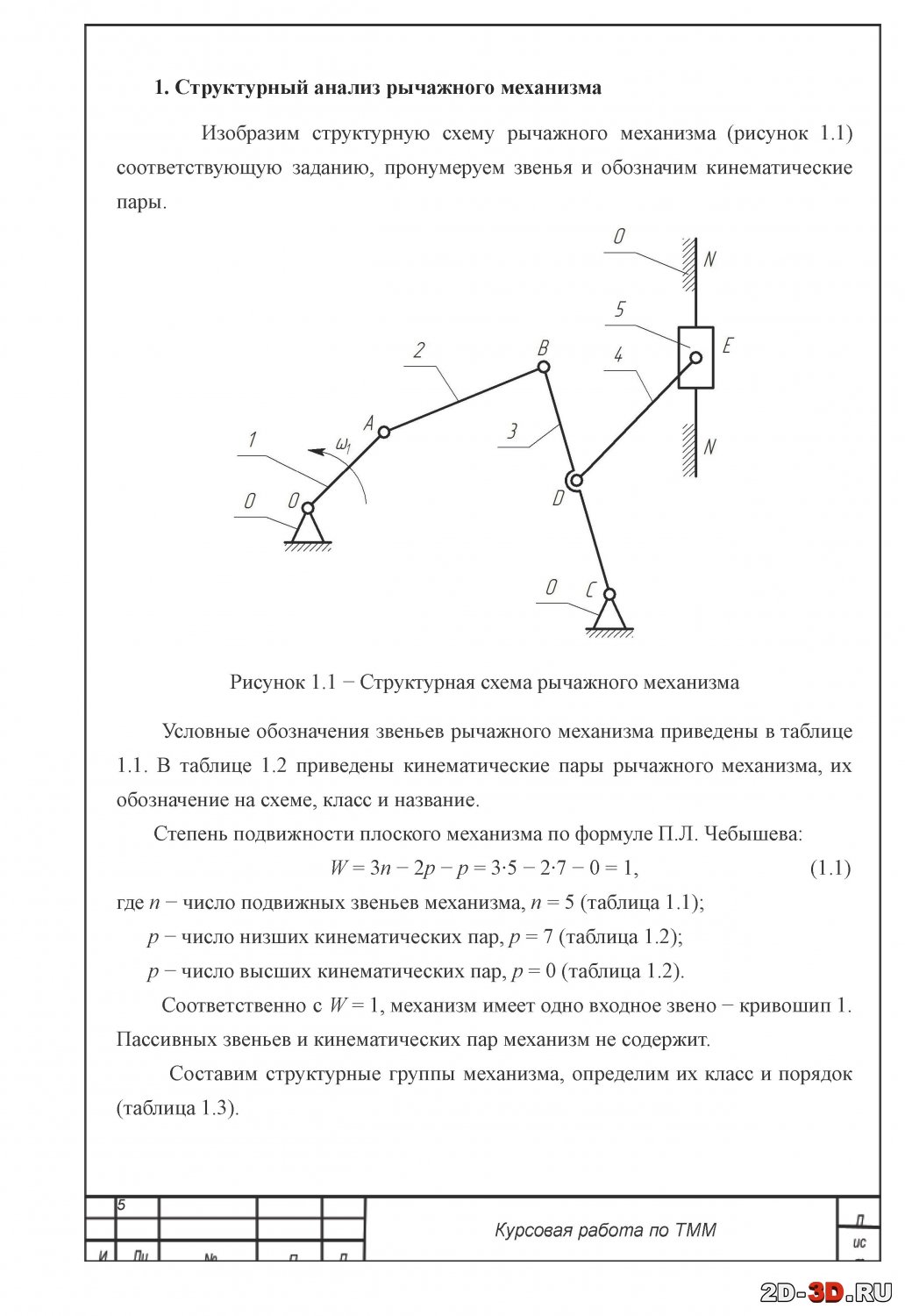
Структурный, кинематический и силовой анализ плоского рычажного механизма


В ходе выполнения курсовой работы получены следующие результаты:
Выполнен структурный анализ исполнительного механизма. Выявлена структура рычажного механизма и последовательность присоединения групп Ассура к начальному звену. Рассмотренный механизм, являющийся механизмом второго класса, структурно работоспособен.
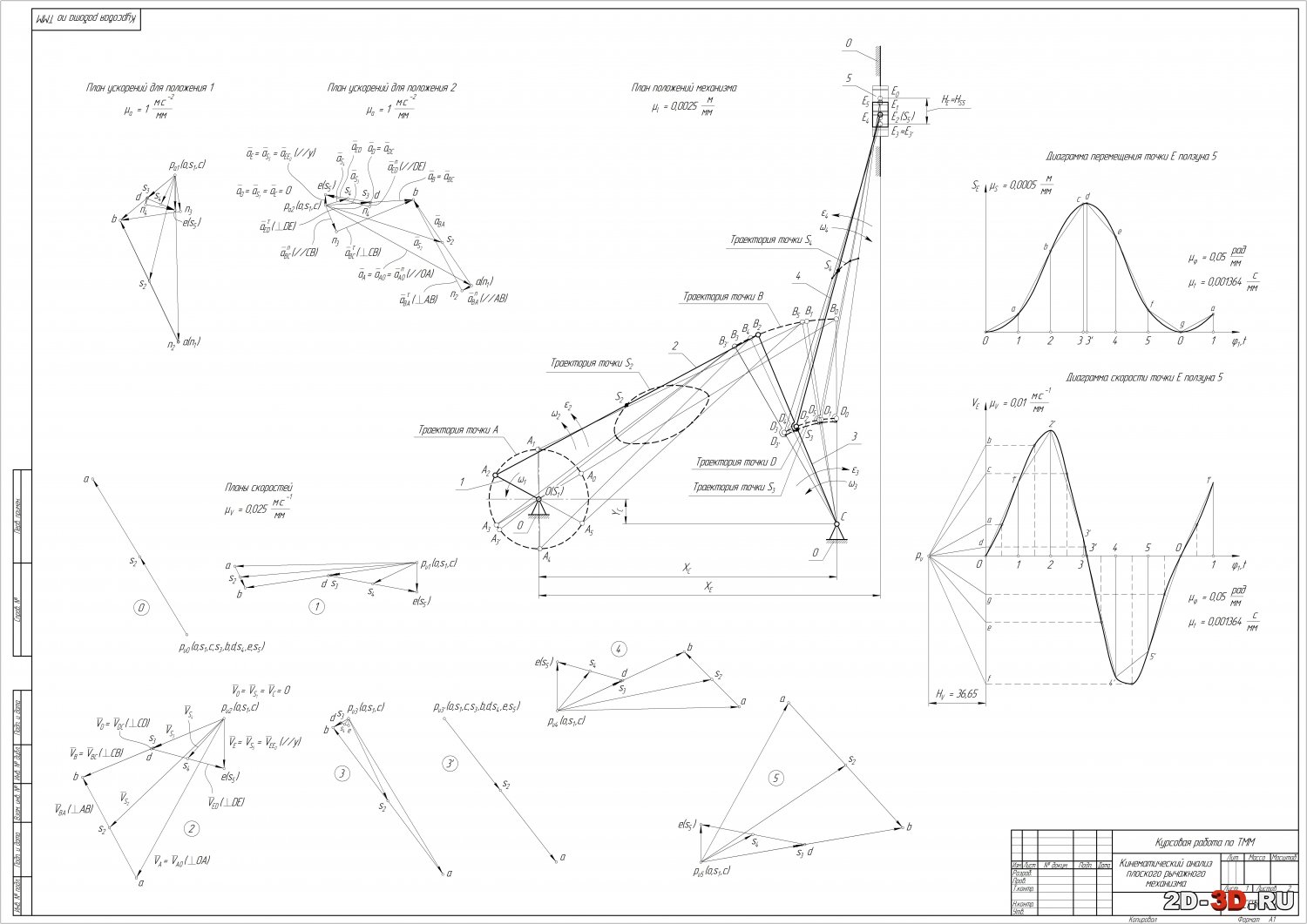
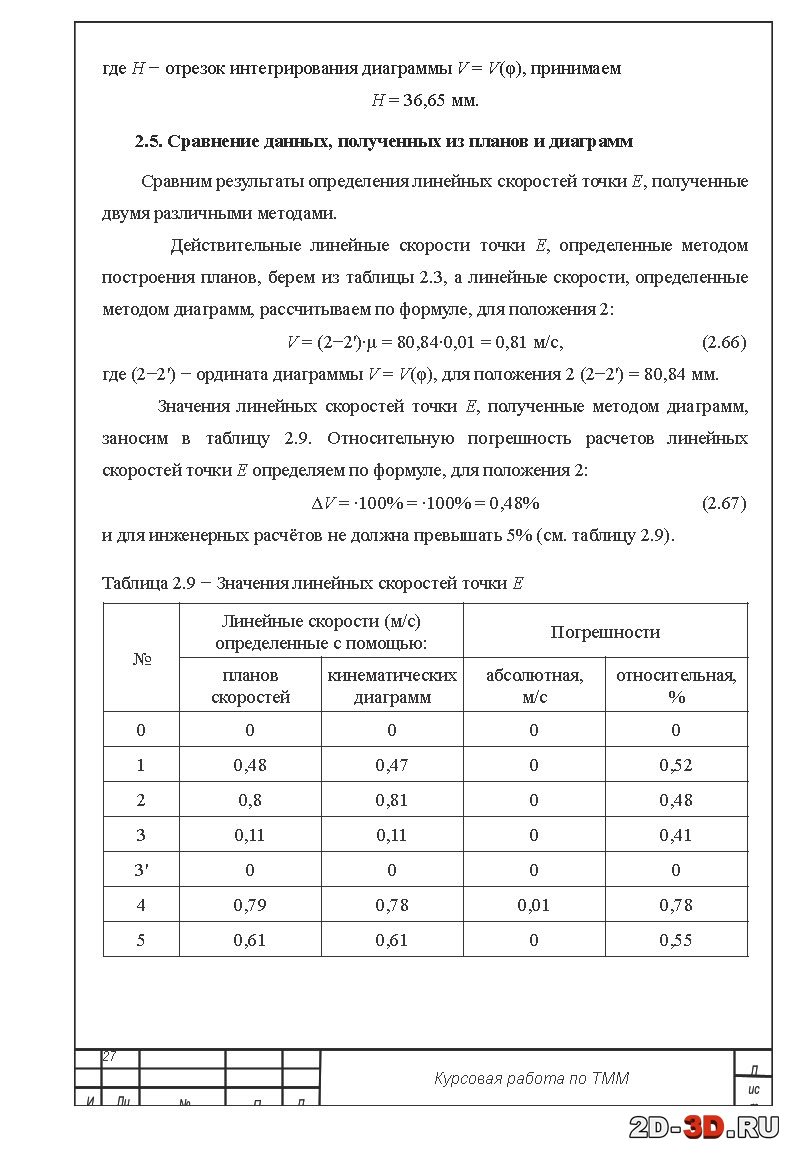
В кинематическом анализе рычажного механизма решение задачи о положениях звеньев механизма произведено графическим методом (методом планов). Построены траектории отдельных точек механизма. Методом планов определены скорости и ускорения точек и звеньев механизма. Построены кинематические графики перемещения, скорости и ускорения выходного звена (ползун 5). Погрешность определения скоростей выходного звена методом планов и из графиков не превышает 5%.
При силовом исследовании рычажного механизма был использован метод планов сил, который основывается на принципе Д’ Аламбера и освобождаемости от связей. В результате построений планов сил для каждой из структурных групп в отдельности найдена уравновешивающая сила на ведущем звене (кривошип 1), и, для правильности расчета методом сил, определена уравновешивающая сила методом «жесткого рычага» Н.Е. Жуковского. При сравнении найденных погрешность составила 0,002% для положения 2, что говорит о правильности расчетов.
В ходе динамического анализа механизма определен приведенный момент движущих сил Mд = 38,66 Н·м и рассчитан необходимый момент инерции маховых масс Jм = 1,629 кг∙м2, обеспечивающий заданный коэффициент неравномерности δ = 0,05. Определены размеры и масса маховика установленного на валу электродвигателя.
1. Структурный анализ рычажного механизма
2. Кинематический анализ механизма
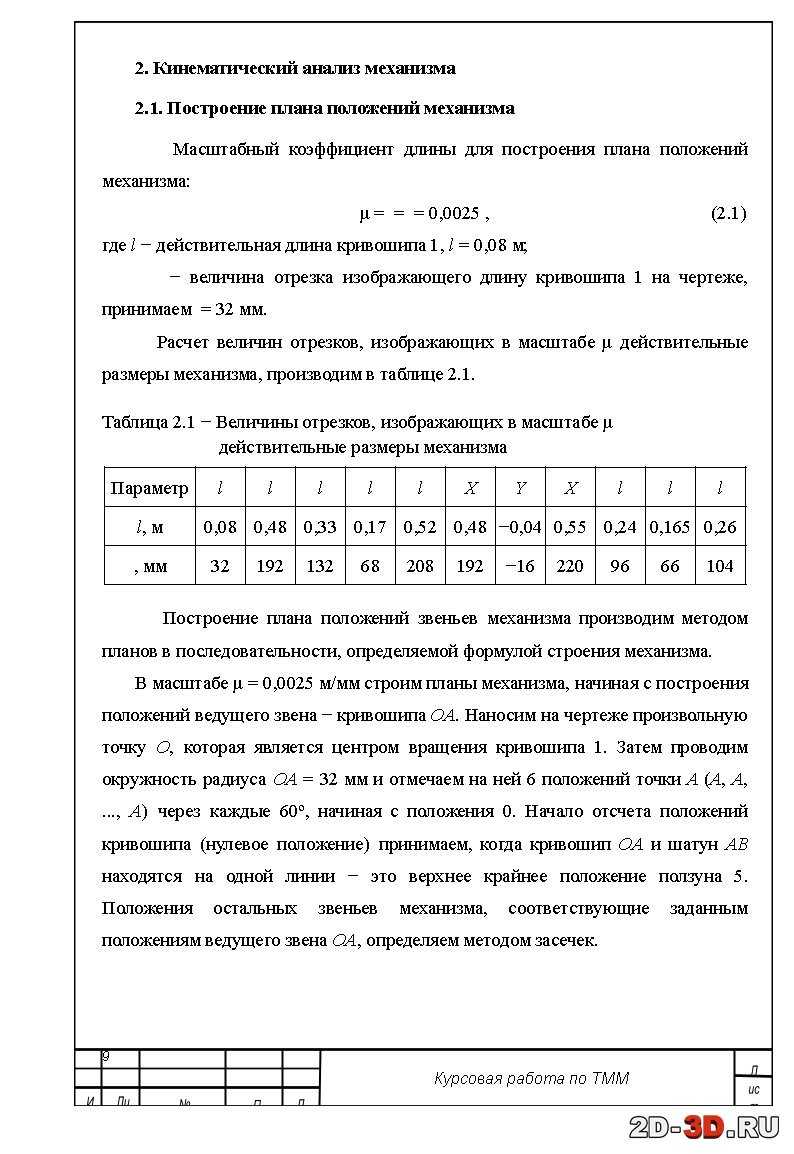
2.1. Построение плана положений механизма
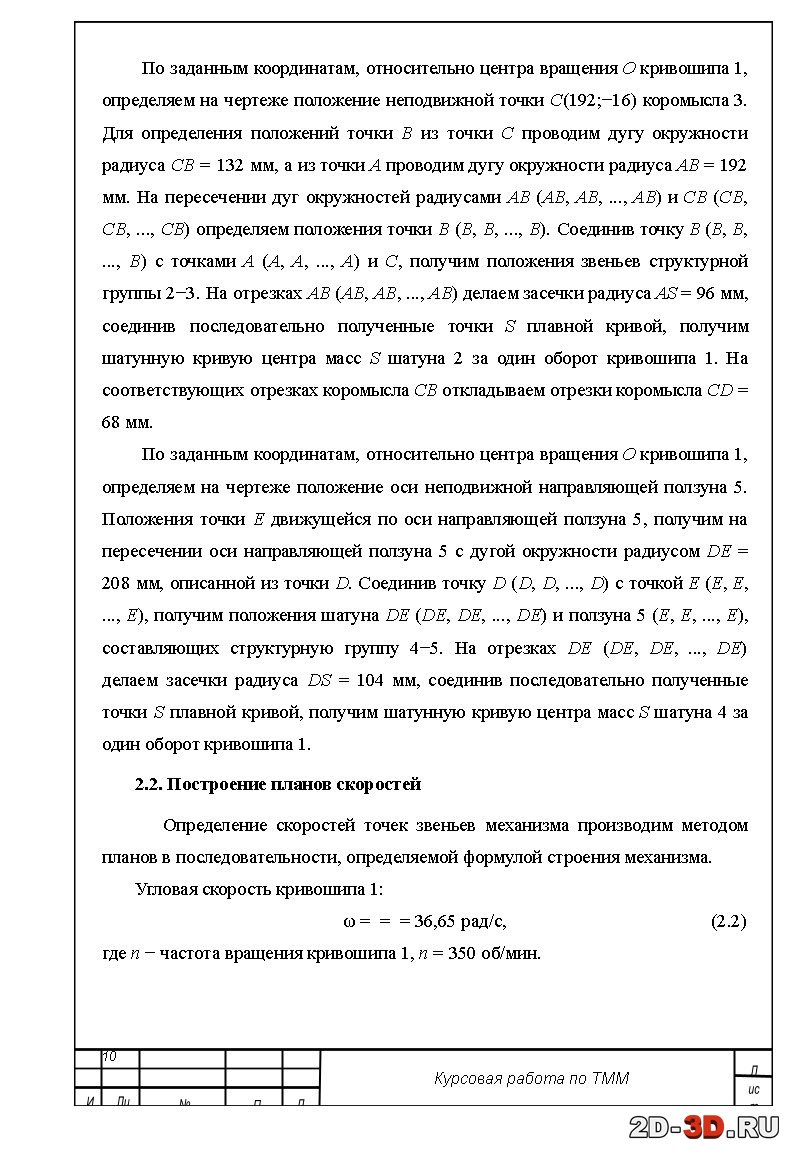
2.2. Построение планов скоростей
2.3. Построение планов ускорений
2.4. Построение кинематических диаграмм
2.5. Сравнение данных, полученных из планов и диаграмм
3. Силовой анализ механизма
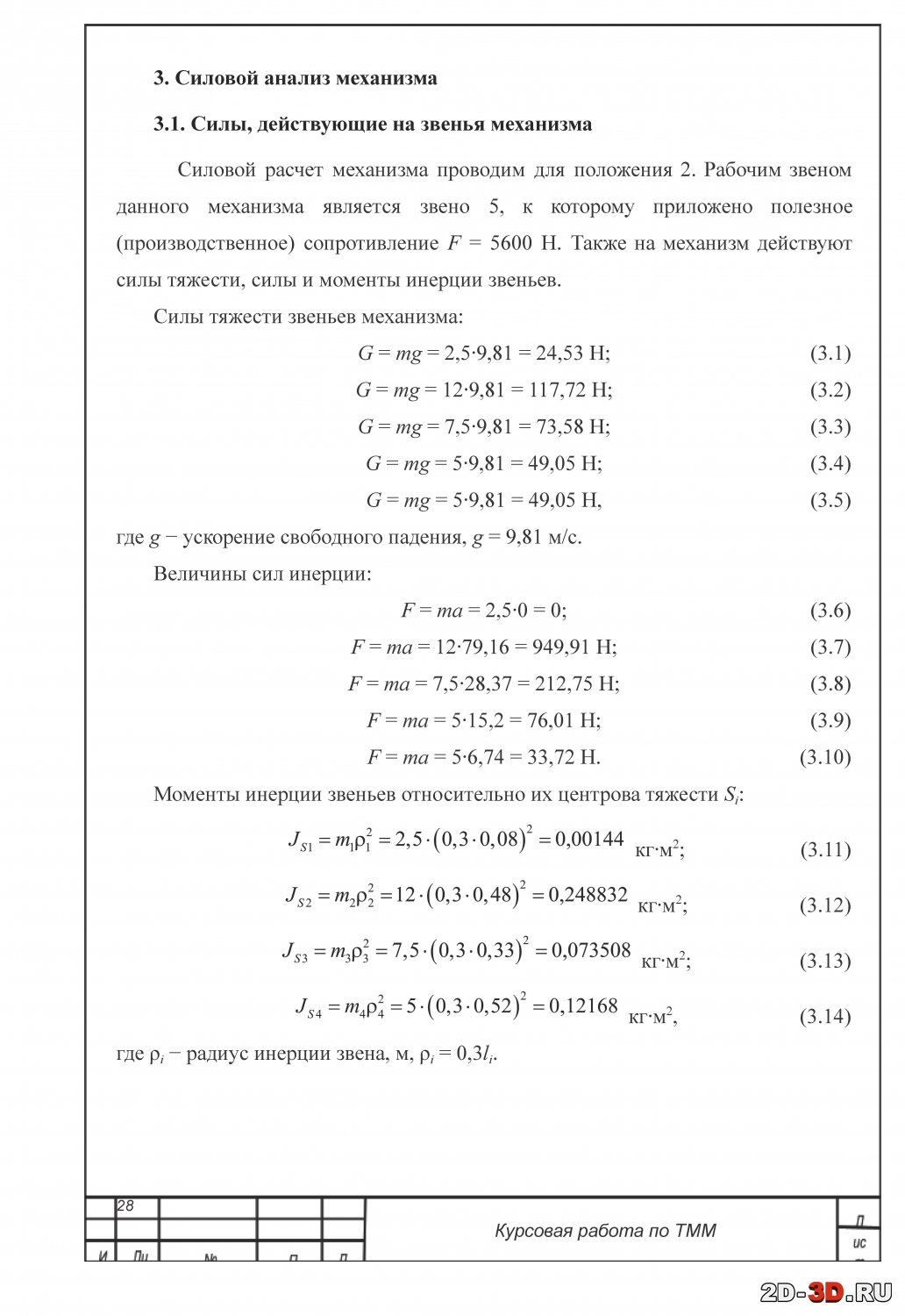
3.1. Силы, действующие на звенья механизма
3.2. Определение уравновешивающей силы от действия сил тяжести и внешней силы
3.3. Силовой расчет группы Ассура 4−5 второго вида
3.4. Силовой расчет группы Ассура 2−3 первого вида
3.5. Силовой расчет начального звена 0−1
3.6. Определение величины уравновешивающей силы методом рычага Н.Е. Жуковского
3.7. Выбор электродвигателя
4. Динамический анализ механизма
4.1. Построение диаграммы приведенных моментов сил сопротивления
4.2. Построение диаграмм работ и приведенного момента сил движущих
4.3. Построение диаграммы изменения кинетической энергии
4.4. Определение приведенного момента инерции механизма
4.5. Геометрический расчет маховика
Заключение
Список использованных источников
Курсовая работа по дисциплине «Теория машин и механизмов» предусматривает исследование структуры, кинематики и динамики плоского рычажного исполнительного механизма.
Результатом структурного анализа является определение его класса, по которому в дальнейшем можно выбрать методы его последующих исследований. Помимо того, также определяется класс кинематических пар в составе механизма и его подвижность.
Кинематический анализ предусматривает расчет кинематических характеристик. В данном разделе строятся положения механизма в различные моменты времени, рассчитываются скорости, ускорения, перемещения точек и звеньев. Расчеты ведутся методом планов (т.е. решение уравнений векторным способом).
Основные задачи силового анализа плоского рычажного механизма заключаются в определении параметров приводов машин и механизмов по приложенным к ним силам. По результатам силового анализа проектируется кинематическая схема привода и подбирается двигатель.
Расчет динамических характеристик механизма предусматривает определение величины приведенного момента инерции – обобщенной характеристики инерционности механизма. Знание величины приведенного момента инерции механизма позволяет уравновесить механизм с помощью маховика, который обеспечивает заданный коэффициента неравномерности движения.
| Тип проекта | Курсовой проект | Кол-во листов (чертежей) |
| Формат | cdw, Компас-3D, dwg, AutoCAD, pdf | 46 (2) |
 Анализ и синтез механизмов сложной технической системы
Анализ и синтез механизмов сложной технической системы Анализ и синтез механизмов технологической машины строгальный станок
Анализ и синтез механизмов технологической машины строгальный станок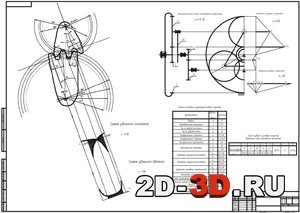 Проектирование и исследование механизмов колесного трактора
Проектирование и исследование механизмов колесного трактора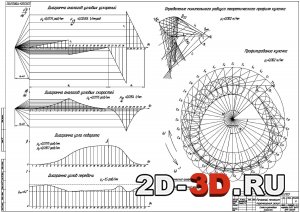 Анализ и синтез механизма вариант № 21.03
Анализ и синтез механизма вариант № 21.03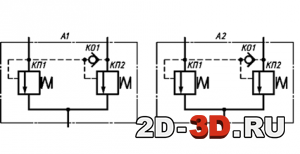 ГОСТ 2.704-2011 ЕСКД. Правила выполнения гидравлических и пневматических схем
ГОСТ 2.704-2011 ЕСКД. Правила выполнения гидравлических и пневматических схем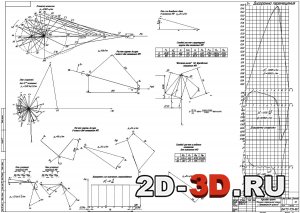 Механизм строгального станка с вращающейся кулисойАнализ и синтез механизмов сложной технической системыАнализ и синтез механизмов технологической машины строгальный станокПроектирование и исследование механизмов колесного трактораАнализ и синтез механизма вариант № 21.03ГОСТ 2.704-2011 ЕСКД. Правила выполнения гидравлических и пневматических схемМеханизм строгального станка с вращающейся кулисой
Механизм строгального станка с вращающейся кулисойАнализ и синтез механизмов сложной технической системыАнализ и синтез механизмов технологической машины строгальный станокПроектирование и исследование механизмов колесного трактораАнализ и синтез механизма вариант № 21.03ГОСТ 2.704-2011 ЕСКД. Правила выполнения гидравлических и пневматических схемМеханизм строгального станка с вращающейся кулисой