Формат файлов: MS Office Visio, AutoCAD, Word, vsd, vsdx, dwg, docx
Кол-во чертежей: 4
Категории: Чертежи проекты / Автоматизация, электроника
| Тип проекта |
Учебный |
Кол-во листов (чертежей) |
| Формат |
MS Office Visio, AutoCAD, Word, vsd, vsdx, dwg, docx |
14 (4) |
Электромеханическая
позиционная следящая система
Курсовой
проект
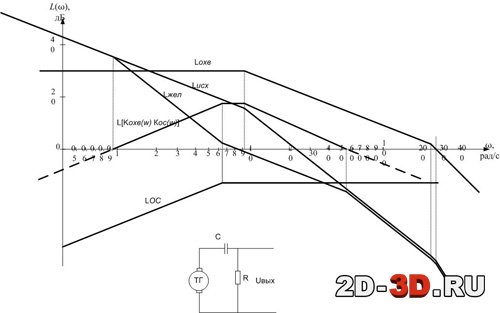
Список чертежей: ЛАЧХ,
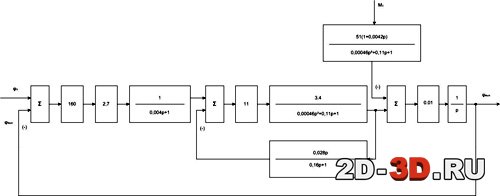
структурная схема (нескорректированная), структурная схема (скорректированная),
АФЧХ+переходная характеристика.
АФЧХ+Переходная характеристика не открывается.
Целью данного курсового проектирования
является разработка и расчет электромеханической позиционной следящей системы,
удовлетворяющей вышеперечисленным
требованиям, а именно: требованиям к точности и динамическим свойствам,
надежности и чувствительности системы к влиянию внешних воздействий, габаритам
и весу системы.
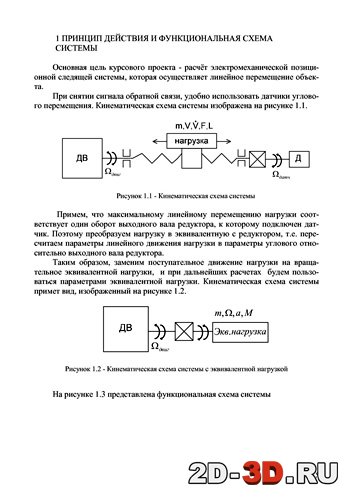
При выполнении проекта
была разработана и исследована электромеханическая позиционная следящая
система. Исходя из требований,
предъявляемым к системе были выбраны необходимые функциональные элементы и определены их математические модели. После чего из условий обеспечения заданной
точности чего был рассчитан необходимый
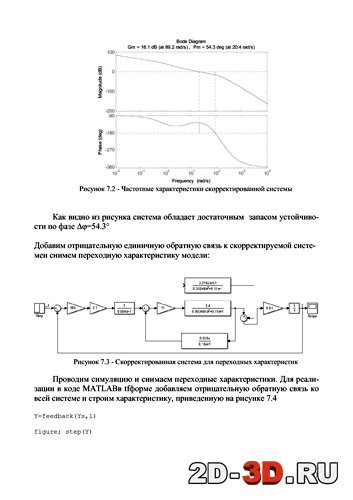
коэффициент усиления. Анализ динамики показал, что требования к заданным
показателям качества регулирования не удовлетворены, поэтому было принято
решение о введении в систему корректирующего устройства в виде обратной связи,
передаточную функцию которого определили методом графических построений логарифмических
амплитудных характеристик.
Также были рассчитаны
параметры схемной реализации корректирующего устройства. На заключительном
этапе путем моделирования системы в пакете MATLAB определили показатели
качества регулирования. Проанализировав полученные результаты, убедились, что система полностью
удовлетворяет заданным требованиям.
Содержание
пояснительной записки
Введение
1 Принцип
действия и функциональная схема системы
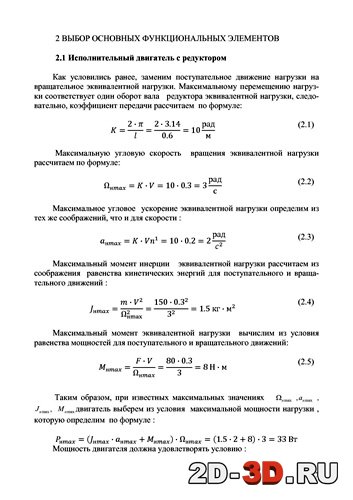
2 Выбор
основных функциональных элементов
2.1
Исполнительный двигатель с редуктором
2.2
Усилитель мощности
2.3
Датчик рассогласования
2.4
Усилительно-преобразовательное устройство
3 Математические
модели элементов системы
3.1
Математическая модель двигателя постоянного тока
3.2.
Математическая модель усилителя мощности
3.3
Математическая модель датчика рассогласования
3.4
Математическая модель фильтра низких частот
3.5
Математическая модель редуктора
3.6.
Математическая модель предварительного усилителя
3.7.
Математическая модель демодулятора
4.
Структурная схема и статический расчет системы
5 Расчет
динамики системы и синтез корректирующих устройств
6 Реализация
корректирующих устройств
7 Анализ
скорректированной системы
Заключение
Список
использованных источников
| Тип проекта |
Учебный |
Кол-во листов (чертежей) |
| Формат |
MS Office Visio, AutoCAD, Word, vsd, vsdx, dwg, docx |
14 (4) |


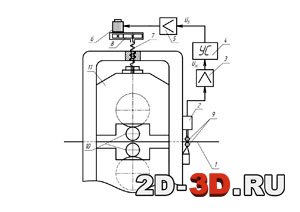 Функциональная схема устройства активного контроля при прокатывании
Функциональная схема устройства активного контроля при прокатывании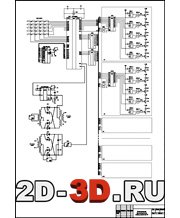 Система телеуправления и телесигнализации
Система телеуправления и телесигнализации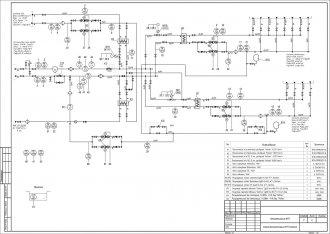 Проект автоматизации индивидуального теплого пункта на базе контроллеров Овен
Проект автоматизации индивидуального теплого пункта на базе контроллеров Овен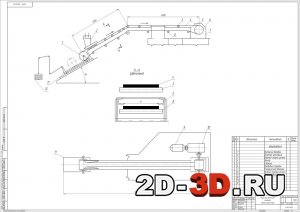 Механизация и автоматизация дозирования сыпучих компонентов при производстве гипсовых смесей
Механизация и автоматизация дозирования сыпучих компонентов при производстве гипсовых смесей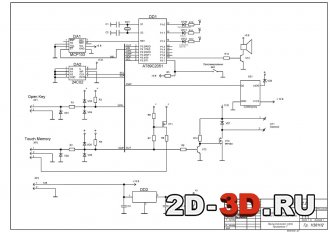 Разработка устройства ввода данных и паролей с пластиковой картой
Разработка устройства ввода данных и паролей с пластиковой картой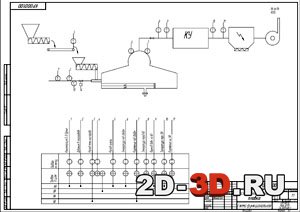 Автоматизация печи кислородно-факельной плавки при переработке медных концентратов
Автоматизация печи кислородно-факельной плавки при переработке медных концентратов