Категории: Чертежи проекты / Военная техника
| Тип проекта |
Учебный |
Кол-во листов (чертежей) |
| Формат |
|
|
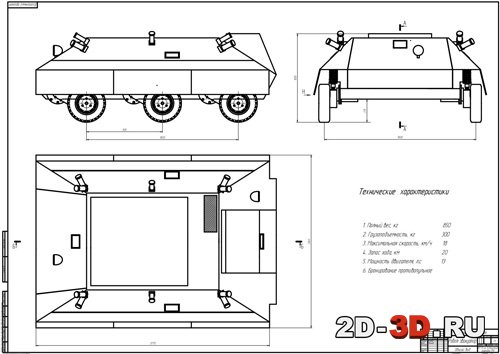
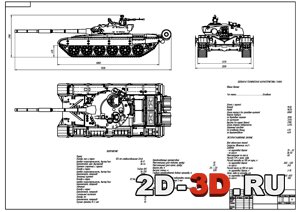
Малогабаритный робот-разведчик
Дипломный проект
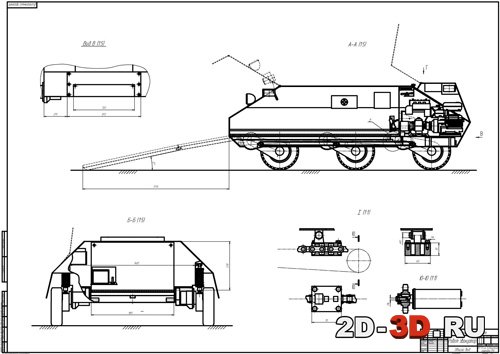
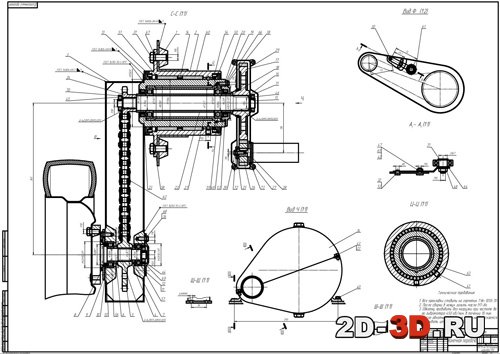
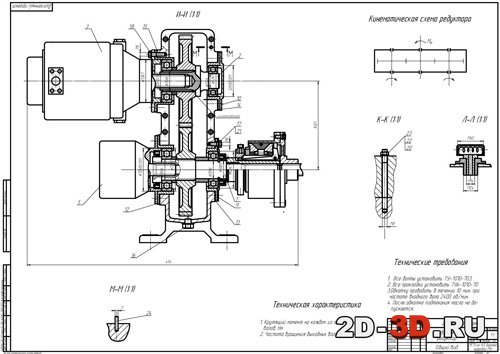
Список чертежей: конечная передача, робот, гидростанция, раздаточный редуктор, разрезы машины, операции сборки, характеристики подвески, подвеска, операции сборки оси колеса, схемы трансмиссии, характеристики трансмиссии, экономика, спецификации.
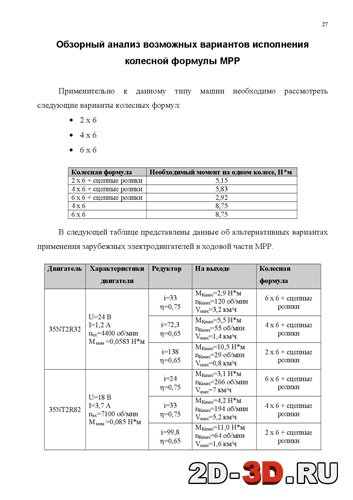
В исследовательской части работы проведён анализ физико-механических свойств опорной поверхности, обзорный анализ возможных вариантов исполнения колесной формулы МРР, определены критерии оценки применения той или иной колесной формулы.
В конструкторской части проведен выбор типов приводов, обеспечивающих техническое задание и тяговый расчет МРР.
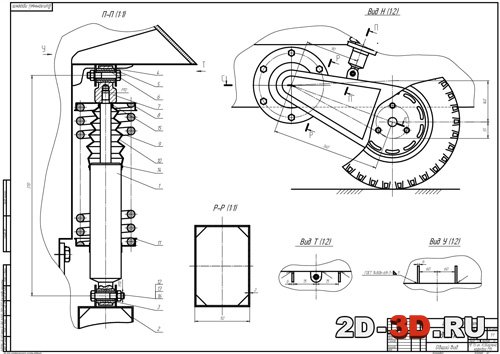
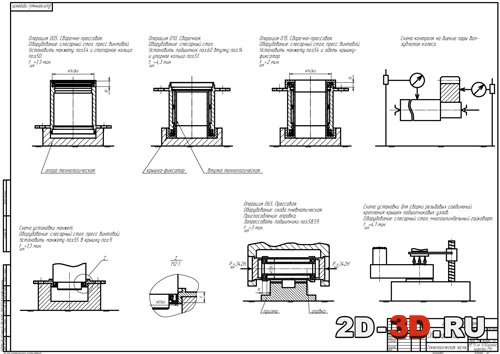
В технологической части работы разработан технологический процесс сборки узла конечного звена манипулятора.
В организационно-экономической части работы разработан бизнес-план инновационного проекта.
В разделе "Промышленная экология и безопасность" рассмотрены общие эргономические требования к средствам управления малогабаритного робота – разведчика.
Содержит маршрутно-операционную карту. Технические характеристики:
1. Полный вес, кг 850
2. Грузоподъемность, кг 300
3. Максимальная скорость, км/ч 18
4. Запас хода, км 20
5. Мощность двигателя, л.с 13
6. Бронирование - противопульное
Технические характеристики раздаточного редуктора:
1. Крутящий момент на каждом из тихоходных валов, Нм 17.6
2. Частота вращения выходных валов, об/мин 2400
Содержание пояснительной запискиСодержание
Аннотация
Перечень вопросов, подлежащих разработке (рассмотрению) в дипломном проекте
Исследовательская часть
Физико – механические свойства опорной поверхности
Геометрические характеристики опорной поверхности
Прямолинейное движение колеса по твердой опорной поверхности
Сцепление колеса с опорной поверхностью
Сопротивление качению колеса по твердой опорной поверхности
Особенности качения колеса по деформируемой опорной поверхности (ворсистые настилы, ковровые покрытия и т. п.)
Конструкторская часть
Обзорный анализ возможных вариантов исполнения колесной формулы МРР
Критерии оценки применения той или иной колесной формулы
Режим работы и предельный момент нагрузки электродвигателя
Тяговый расчет
Исходные данные
Определение потребной силы тяги
Определение необходимого тягового момента
Определение необходимого тягового момента на одном колесе
Подбор электродвигателей
Электродвигатель 35NT2R32
Электродвигатель ДПР - 72
Проверка электродвигателя ДПР - 72 по тепловой перегрузке
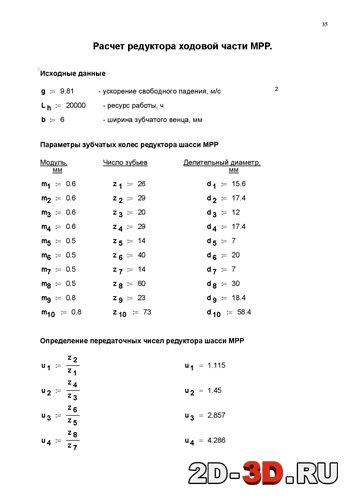
Расчет редуктора ходовой части мрр
Исходные данные
Параметры зубчатых колес редуктора шасси МРР
Определение передаточных чисел редуктора шасси МРР
Определение моментов, частот вращения и окружных скоростей зубчатых колес редуктора шасси МРР
Расчет зубчатых передач редуктора шасси МРР
Выбор твердости, термической обработки и материалов колес редуктора шасси МРР
Проверка зубьев колес по контактным напряжениям
Силы в зацеплениях
Расчетные напряжения изгибов
Система управления
Работа системы управления МРР
Технологическая часть
Разработка технологического процесса сборки узла конечного звена манипулятора (схвата)
Назначение узла. Краткое описание конструкции
Анализ технических требований
Анализ технологичности конструкции
Расчет усилий запрессовки подшипников
Нормирование времени сборочных операций
Обоснование последовательности и методов сборки
Примеры типовых операций
Методы подготовки деталей к сборке
Организационно-экономическая часть
Бизнес-план инновационного проекта "Малогабаритный робот – разведчик"
Возможность предприятия (резюме)
Описание и характеристики МР – разведчика
Оценка рынков сбыта изделия
План маркетинга
Выбор ценовой политики
Определение себестоимости изделия
Экономические показатели в производстве
Расчет себестоимости изделия
Расчет стоимости ОКР
Расчет нормативной трудоемкости разработки чертежей
Расчет затрат на оплату труда исполнителей
Расчет амортизационных отчислений
Смета затрат на ОКР
Себестоимость МРР
Определение ожидаемой цены и прибыли
Финансовый план
Промышленная экология и безопасность
Общие эргономические требования к средствам управления малогабаритного робота – разведчика
Требования к средствам отображения информации
Требования к органам управления
Требования к средствам связи и дополнительному оборудованию рабочего места
Требования к форме и габаритным размерам рабочего места
Требования к креслу оператора
Требования к размещению средств отображения информации и органов управления
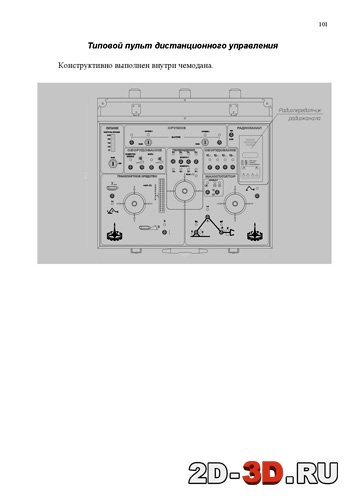
Типовой пульт дистанционного управления
Список использованной литературы
| Тип проекта |
Учебный |
Кол-во листов (чертежей) |
| Формат |
|
|

 Танк Т-72Б
Танк Т-72Б Бронетранспортёр БТР-80
Бронетранспортёр БТР-80 Гаубица «Гвоздика» 2С1 самоходная
Гаубица «Гвоздика» 2С1 самоходная Танк Т90
Танк Т90 Танк Т-34
Танк Т-34 Пушка ЗиС-3
Пушка ЗиС-3